![]()
पिकरबॉट प्रो वापरकर्ता मॅन्युअल
कृपया लक्षात ठेवा की दर्शविलेल्या प्रतिमा केवळ उदाहरणासाठी आहेत*.
लेखक: वेन लिऊ, रेली स्मिथर्स
३ जुलै २०२४
सारांश
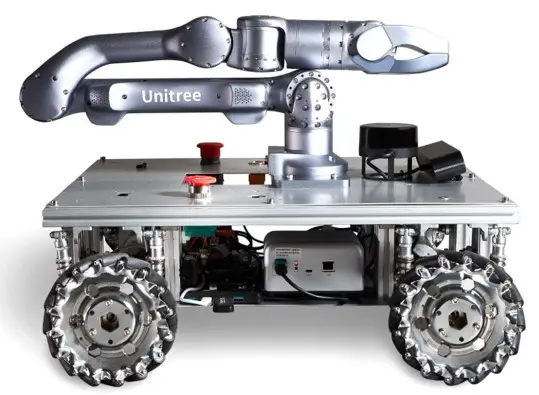
पिकरबॉट प्रो हे एक अष्टपैलू R&D रोबोटिक्स प्लॅटफॉर्म आहे ज्याचा वापर विविध ऍप्लिकेशन्ससाठी केला जाऊ शकतो, जसे की कृषी, खाणकाम आणि बांधकाम आणि घरामध्ये, रोबोट-सहाय्यित लॉजिस्टिक, शोध आणि बचाव प्रात्यक्षिके आणि मॅपिंगसह.
Unitree Z1 Pro रोबोटिक आर्म 740mm रीच आणि 3kg पेलोड क्षमतेसह वैशिष्ट्यीकृत, Pickerbot Pro 6 अंश स्वातंत्र्यासह, जबरदस्त अभिप्राय आणि टक्कर शोधण्याच्या क्षमतेसह प्रभावी अभिव्यक्ती ऑफर करते.
NVIDIA Jetson Orin मालिका सिंगल-बोर्ड-कॉम्प्युटर (नॅनो किंवा NX व्हेरिएंट) द्वारे समर्थित, हे कॉम्पॅक्ट आणि हलके डिझाइन राखून CUDA वापरून शक्तिशाली ग्राफिक्स किंवा समांतर संगणकीय कार्यक्षमतेसह अधिक प्रगत संगणक दृष्टी आणि मशीन-शिक्षण कार्ये प्रदान करते.
Pickerbot Pro मध्ये Orbbec 3D Astra कॅमेरा आहे, जो डेप्थ सेन्सिंग, ऑब्जेक्ट ट्रॅकिंग आणि जेश्चर रेकग्निशन क्षमता प्रदान करतो.
बळकट पण हलक्या वजनाच्या चेसिसवर तयार केलेले, पिकरबॉट प्रो असमान भूभागावर वर्धित नेव्हिगेशनसाठी स्वतंत्र निलंबनासह 4WD प्रणाली वैशिष्ट्यीकृत करते. मोठे मेकॅनम चाके अचूक सर्वदिशात्मक हालचाल प्रदान करतात परंतु उच्च पकड देतात.
मुख्य घटक आणि हार्डवेअर
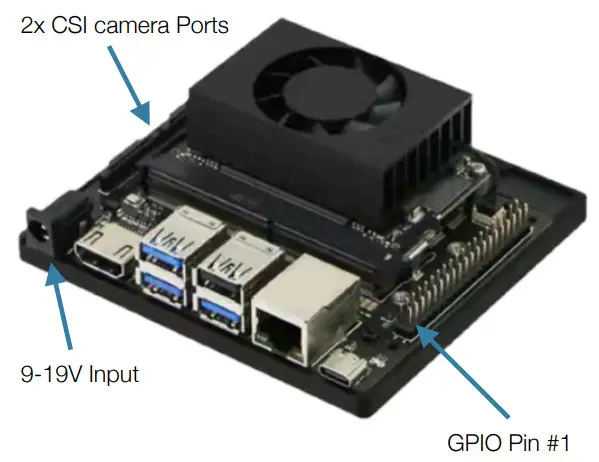
1.1 ROS 2 कंट्रोलर: NVIDIA Jetson Orin (NX 8GB किंवा Nano 4GB)
ऑनबोर्ड जेटसन ओरिन सिंगल बोर्ड कॉम्प्युटर पिकरबॉट प्रो ला शक्तिशाली एम्बेडेड संगणन प्रदान करतो. हे 128gb SSD, Intel Wireless कार्ड आणि ऑनबोर्ड अँटेना, HDMI, चार USB पोर्ट (ज्यापैकी 3 USB 3.0 आहेत), इथरनेट आणि USB-C सह येते. 9-19V दरम्यान वापरून, बोर्डला पॉवर करण्यासाठी DC बॅरल जॅक. ऑनबोर्ड GPIO पिन लोकप्रिय रास्पबेरी पाई सिंगल बोर्ड संगणकांप्रमाणेच मूळ लेआउट वापरतात, इथरनेट पोर्टला लागून असलेल्या बाहेरील पंक्तीवर पिन #1 ने सुरू होतात. त्याचप्रमाणे, दोन CSI कॅमेरा कनेक्टर रास्पबेरी Pi ब्रँड आणि तत्सम स्मॉल-फॉर्म-फॅक्टर कॅमेऱ्यांसह कार्यक्षमता सक्षम करतात.
पूर्व-स्थापित सॉफ्टवेअरमध्ये ROS 2 Humble, Ubuntu 22.04, आणि NVIDIA Jetpack समाविष्ट आहे, जे ओरिन प्लॅटफॉर्मची पूर्ण क्षमता सक्षम करते.
टीप: चेसिस कंट्रोलर आणि इतर रोबोट घटकांसह सुसंगतता राखण्यासाठी, आम्ही भिन्न सॉफ्टवेअरसह जेटसन ओरिन फ्लॅश करण्याची शिफारस करत नाही. अधिक प्रगत वापर प्रकरणांसाठी कृपया Roboworks समर्थनाशी संपर्क साधा.
1.2 सेन्सिंग सिस्टम: LiDAR आणि डेप्थ कॅमेरा
पिकरबॉट प्रो लीशेन M10 LSLiDAR ने सुसज्ज आहे. 30m जास्तीत जास्त शोध श्रेणी आणि 12Hz रोटेशनल स्कॅनिंग वारंवारता, आणि उच्च सिग्नल-टू-आवाज गुणोत्तर, अतिरिक्त फिल्टरिंगची आवश्यकता दूर करते. हे उत्कृष्ट मॅपिंग आणि नेव्हिगेशनल क्षमता प्रदान करून अखंडपणे समाकलित होते.
याव्यतिरिक्त, पिकरबॉट प्रो ऑर्बेक एस्ट्रा डेप्थ कॅमेरासह सुसज्ज आहे, जो एक आरजीबी खोली कॅमेरा आहे. हा कॅमेरा ROS 3 सह जेश्चर कंट्रोल, स्केलेटन ट्रॅकिंग, 2D स्कॅनिंग, ऑब्जेक्ट डिटेक्शन आणि पॉइंट क्लाउड डेव्हलपमेंटसह अनेक वापरांसाठी ऑप्टिमाइझ केला आहे.
| डेप्थ रिझोल्यूशन | आरजीबी रिझोल्यूशन | RGB संवेदना कोन | खोली FPS | RGB फ्रेमरेट | खोली फ्रेमरेट | खोली श्रेणी |
| 640×480 | 640×480 | 63.1 × 49.4 ° | 58 × 45.5 ° | 30fps | 30fps | ०.६~४मी |
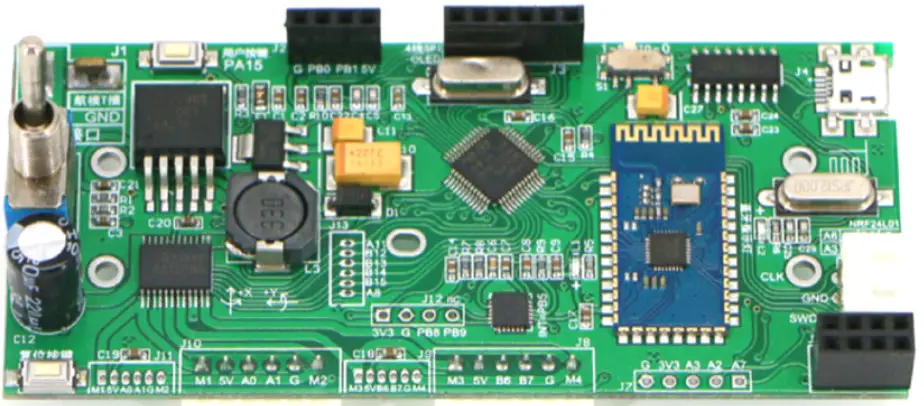
1.3 STM32 कंट्रोल बोर्ड (मोटर कंट्रोल आणि IMU)
चेसिस आणि मोटर कंट्रोलसाठी, पिकरबॉट प्रो मध्ये STM32 कंट्रोल बोर्ड आहे. हे बोर्ड कमी उर्जा वापर, अचूक मोटर नियंत्रण, मॉनिटरिंग मोटर्ससाठी OLED रीडआउट डिस्प्ले आणि एक जडत्व मापन युनिट (IMU) सुनिश्चित करते. हे अधिक विशेष ऑपरेशनसाठी किंवा जेटसन ओरिन कंट्रोलरला एन्कोडर फीडबॅक सक्षम करण्यासाठी कॉन्फिगर केले जाऊ शकते. STM32F103 च्या संकलनासाठी आणि त्यानंतरच्या फ्लॅशिंगसाठी Keil आणि FlyMCU ही सॉफ्टवेअर पॅकेजेस वापरणे.
| STM32F103RC | वैशिष्ट्ये |
| कोर | ARM32-बिट कॉर्टेक्स -M3 CPU कमाल वेग 72 MHz |
| आठवणी | 512 KB फ्लॅश मेमरी 64kB SRAM |
| घड्याळ, रीसेट आणि पुरवठा व्यवस्थापन | 2.0 ते 3.6 V अनुप्रयोग पुरवठा आणि I/Os |
| शक्ती | झोप. थांबा आणि स्टँडबाय मोड RTC आणि बॅकअप रजिस्टर्स BAT साठी V पुरवठा |
| DMA | 12-चॅनेल डीएमए नियंत्रक |
| डीबग मोड | SWD आणि जेTAG इंटरफेस कॉर्टेक्स-एम3 एम्बेडेड ट्रेस मॅक्रोसेल |
| I/O पोर्ट | 51 I/O पोर्ट (16 बाह्य व्यत्यय वेक्टरवर मॅप करण्यायोग्य आणि 5V सहनशील) |
| टाइमर | 4×16-बिट टाइमर 2 x 16-बिट मोटर कंट्रोल PWM टाइमर (इमर्जन्सी स्टॉपसह) 2 x वॉचडॉग टाइमर (स्वतंत्र आणि विंडो) SysTick टाइमर (24-बिट डाउनकाउंटर) DAC चालविण्यासाठी 2 x 16-बिट मूलभूत टाइमर |
| संप्रेषण इंटरफेस | USB 2.0 पूर्ण गती इंटरफेस SDIO इंटरफेस CAN इंटरफेस (2.0B सक्रिय) |
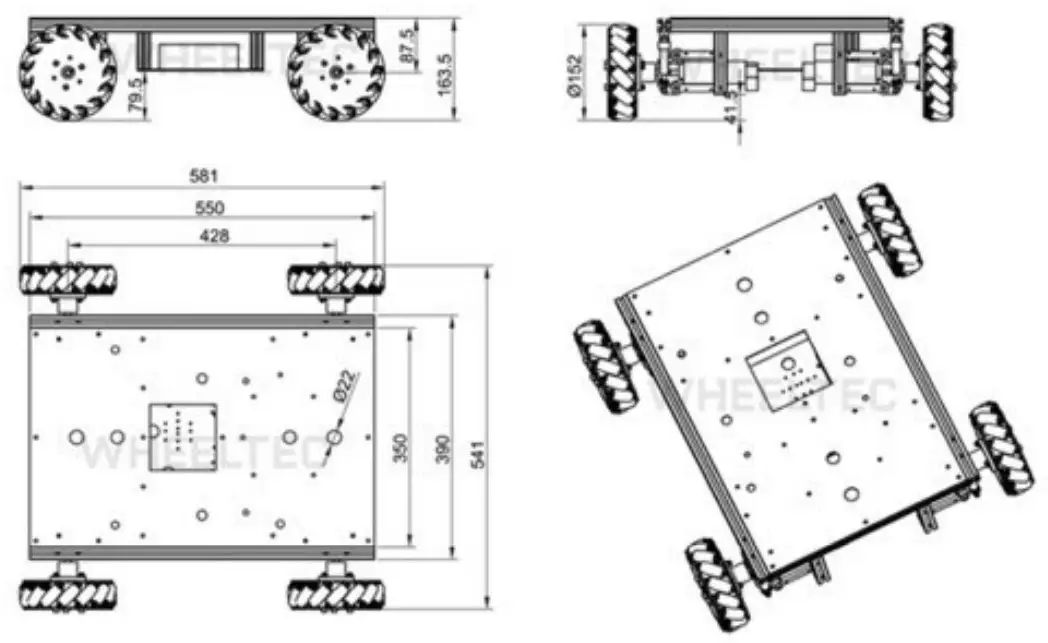
1.4 चेसिस ओव्हरview आणि बॅटरी पर्याय
पिकरबॉट प्रो सर्व दिशात्मक मेकॅनम व्हीलसह सुसज्ज आहे, प्रत्येकामध्ये 45-डिग्री ऑफसेट रोलर्स आहेत जे सर्व दिशांना हालचाली सुलभ करतात. हे लक्षात घेणे महत्त्वाचे आहे की ही चाके जोड्यांमध्ये पुरवली जातात, प्रत्येक जोडीचे रोलर्स वेगळ्या पद्धतीने असतात. रोबोटच्या स्थापनेदरम्यान, तिरपे विरुद्ध असलेल्या चाकांवर रोलर्स समान दिशेने निर्देशित केले आहेत याची खात्री करा. जर रोबोट अनपेक्षितपणे हलला, तर चाकांच्या जोड्या उलट करा.
Considerations must be made when increasing battery capacity. The Pickerbot Pro comes standard with a 5000 mAh battery and can be upgraded to 10,000 or 20,000 mAh options for an additional cost. The 20,000 mAh battery is too large to fit within the chassis of the Pickerbot Pro and can only be installed on top of the robot chassis. Please refer to the table below for weight and size parameters.
| बॅटरी पॅरामीटर | वैशिष्ट्ये | ||
| 5000mAh | 10000mAh | 20000mAh | |
| बॅटरी व्हॉल्यूमtage | 22.2V | 22.2V | 22.2V |
| आकार | 124*71*42 मिमी | 124*71*71 मिमी | 156*122*71 मिमी |
| उर्जा चार्जर | DC 5.5 चार्जिंग प्लग टी-आकाराचा डिस्चार्ज प्लग |
DC 5.5 चार्जिंग प्लग टी-आकाराचा डिस्चार्ज प्लग |
DC 5.5 चार्जिंग प्लग टी-आकाराचा डिस्चार्ज प्लग |
| कामगिरी | 15 ए अखंड d ischarge |
30A सतत डिस्चार्ज | 60A सतत डिस्चार्ज |
| वजन | 0.66 किलो | 1.25 किलो | 2.4 किलो |
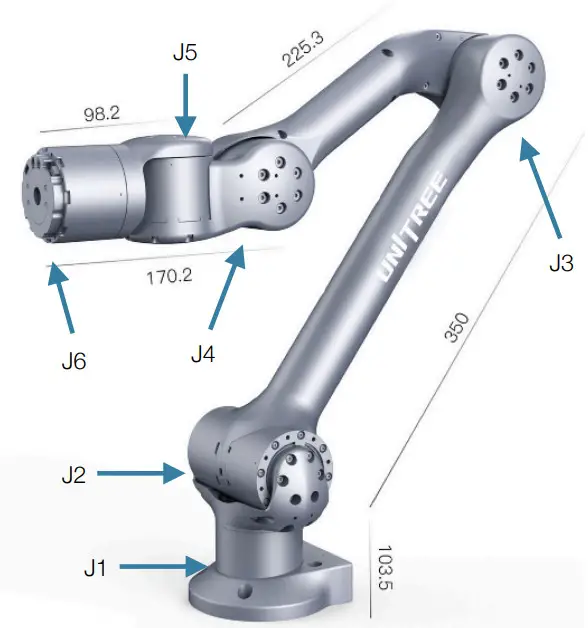
1.5 Unitree Z1 Pro रोबोटिक आर्म
Pickerbot Pro मध्ये Unitree Z1 Pro रोबोटिक आर्मचा समावेश आहे, जो 6 अंश स्वातंत्र्य आणि 740mm च्या पोहोचासह प्रभावी उच्चार प्रदान करतो. कृपया तुमच्या विशिष्ट आवश्यकता पूर्ण करण्यासाठी किनेमॅटिक्स सानुकूलित करण्यासाठी खालील संयुक्त पॅरामीटर सारणी पहा.
| संयुक्त | गती श्रेणी | कमाल गती | कमाल टोक़ |
| J1 | ±150° | 180°/से | 33N·m |
| J2 | ०–१८०° | 180°/से | 33N·m |
| J3 | -१६५°—० | 180°/से | 33N·m |
| J4 | ±80° | 180°/से | 33N·m |
| J5 | ±85° | 180°/से | 33N·m |
| J6 | ±160 | 180°/से | 33N·m |
| पॅरामीटर | Z1 प्रो |
| वजन | 4.5 किलो |
| पेलोड | 3 किलो |
| पोहोचते | 740 मिमी |
| पुनरावृत्तीक्षमता | ~0.1 मिमी |
| वीज पुरवठा | 24V |
| इंटरफेस | इथरनेट |
| सुसंगत ऑपरेटिंग सिस्टम | उबंटू |
| कमाल शक्ती | 500W |
| फीडबॅक सक्ती करा | होय |
सॉफ्टवेअर आणि प्रारंभ करणे
2.1 ROS 2 द्रुत प्रारंभ
जेव्हा रोबोट पहिल्यांदा चालू केला जातो, तेव्हा तो डीफॉल्टनुसार ROS द्वारे नियंत्रित केला जातो. याचा अर्थ, STM32 चेसिस कंट्रोलर बोर्ड ROS 2 कंट्रोलर - द जेटसन ओरिन कडून आदेश स्वीकारतो.
प्रारंभिक सेटअप जलद आणि सोपे आहे, तुमच्या होस्ट PC वरून (Ubuntu Linux शिफारस केलेले) रोबोटच्या Wi-Fi हॉटस्पॉटशी कनेक्ट करा. डीफॉल्टनुसार पासवर्ड "डोंगगुआन" आहे.
पुढे, लिनक्स टर्मिनलद्वारे SSH वापरून रोबोटशी कनेक्ट करा, IP पत्ता 192.168.0.100 आहे, डीफॉल्ट पासवर्ड डोंगगुआन आहे.
![]()
रोबोटच्या टर्मिनल ऍक्सेससह, तुम्ही ROS 2 वर्कस्पेस फोल्डरमध्ये नेव्हिगेट करू शकता, "wheeltec_ROS 2" अंतर्गत चाचणी प्रोग्राम चालवण्यापूर्वी, wheeltec_ROS 2/turn_on_wheeltec_robot/ वर नेव्हिगेट करू शकता आणि wheeltec_udev.sh शोधू शकता - ही स्क्रिप्ट सामान्यत: फक्त एकदाच चालविली जाणे आवश्यक आहे. परिधीयांचे योग्य कॉन्फिगरेशन सुनिश्चित करण्यासाठी.
तुम्ही आता रोबोटच्या कार्यक्षमतेची चाचणी घेण्यास सक्षम आहात, ROS 2 कंट्रोलर कार्यक्षमता लाँच करण्यासाठी, चालवा: “roslaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch”
![]()
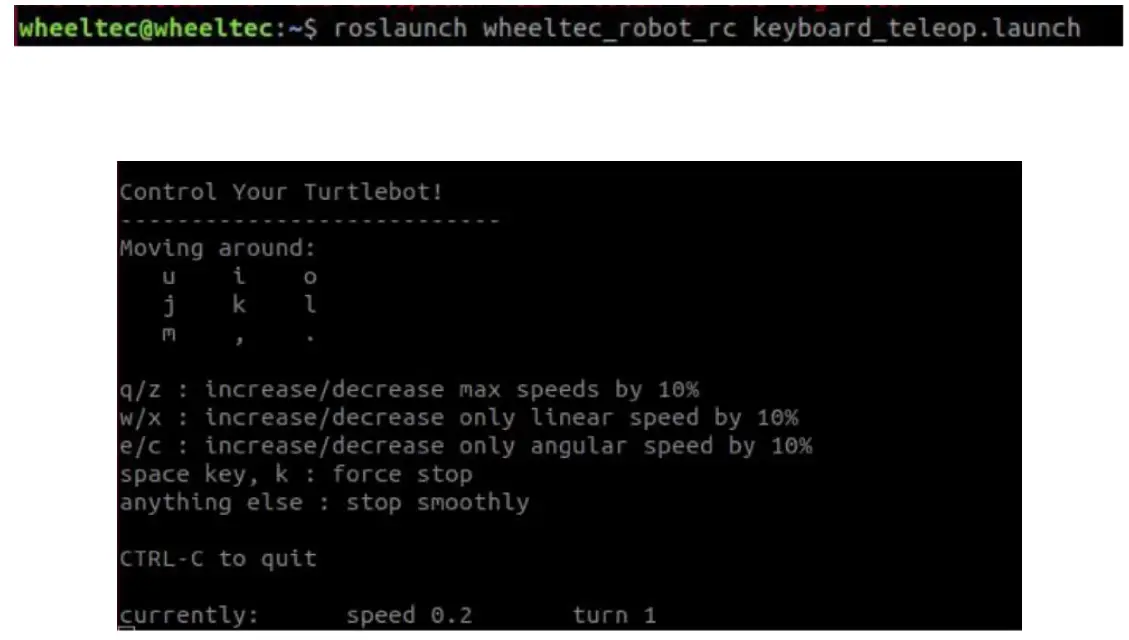
दुसऱ्या टर्मिनलमध्ये, तुम्ही चेसिस कंट्रोल प्रमाणित करण्यासाठी keyboard_teleop नोड वापरू शकता, ही लोकप्रिय ROS 2 Turtlebot ex ची सुधारित आवृत्ती आहे.ampले प्रकार: “roslaunch wheeltec_robot_rc keyboard_teleop.launch”
2.2 चेसिससाठी पूर्व-स्थापित ROS 2 पॅकेजेस
खाली खालील वापरकर्ता-केंद्रित पॅकेजेस आहेत, इतर पॅकेजेस उपस्थित असू शकतात, हे फक्त अवलंबित्व आहेत.
टर्न_ऑन_व्हीलटेक_रोबोट
हे पॅकेज रोबोट कार्यक्षमता सक्षम करण्यासाठी आणि चेसिस कंट्रोलरशी संवाद साधण्यासाठी महत्त्वपूर्ण आहे.
प्राथमिक स्क्रिप्ट “turn_on_wheeltec_robot.launch” प्रत्येक बूटवर ROS 2 आणि कंट्रोलर कॉन्फिगर करण्यासाठी वापरली जाणे आवश्यक आहे.
wheeltec_rviz2
Pickerbot Pro साठी कस्टम कॉन्फिगरेशनसह rviz लाँच करण्यासाठी लाँच फायलींचा समावेश आहे.
wheeltec_robot_slam
पिकरबॉट प्रोसाठी सानुकूल कॉन्फिगरेशनसह SLAM मॅपिंग आणि स्थानिकीकरण पॅकेज.
wheeltec_robot_rrt2
यादृच्छिक वृक्ष अल्गोरिदम वेगाने एक्सप्लोर करणे - हे पॅकेज पिकरबॉट प्रो ला एक्सप्लोरेशन नोड्स लाँच करून, इच्छित स्थानावर जाण्यासाठी मार्गाची योजना करण्यास सक्षम करते.
wheeltec_robot_keyboard
रोबोट कार्यक्षमता प्रमाणित करण्यासाठी आणि कीबोर्ड वापरून नियंत्रित करण्यासाठी सोयीस्कर पॅकेज, रिमोट होस्ट पीसीसह.
wheeltec_robot_nav2
ROS 2 नेव्हिगेशन 2 नोड पॅकेज.
wheeltec_lidar_ROS 2
Leishen M2/N10 कॉन्फिगर करण्यासाठी ROS 10 Lidar पॅकेज.
wheeltec_joy
जॉयस्टिक कंट्रोल पॅकेज, जॉयस्टिक नोड्ससाठी लॉन्च फायलींचा समावेश आहे.
simple_follower_ROS 2
लेसर स्कॅन किंवा डेप्थ कॅमेरा वापरून अल्गोरिदम खालील मूलभूत ऑब्जेक्ट आणि लाइन.
ROS 2_astra_camera
ड्रायव्हर्स आणि लॉन्च फाइल्ससह ॲस्ट्रा डेप्थ कॅमेरा पॅकेज.
रोबोटिक आर्म इंटिग्रेशन
3.1 रोबोटिक आर्म वायरिंग घटक
Unitree Z1 शिफारस केलेले वायरिंग
खाली Unitree Z1 आर्मसाठी शिफारस केलेले वायरिंग घटक आहेत. पॉवर स्विच नंतर ब्रेकआउटवर उपलब्ध महिला 2-पोल डीन कनेक्टर असावा. मालिकेतील घटक कनेक्ट करा. कनेक्टर +/GND कनेक्शन जुळत असल्याची खात्री करा. ब्लेड फ्यूज धारक सकारात्मक पॉवर लाइनवर बसला पाहिजे.
| घटक | प्रमाण |
| पुरुष डीन्स शैली 2 पोल कनेक्टर | x1 |
| पुरुष xt60 शैली 2 पोल कनेक्टर | x1 |
| इनलाइन ब्लेड फ्यूज धारक | x1 |
| 14 AWG 2 कोर केबल | x1 |
| 7.5 ब्लेड फ्यूज | x1 |
हातामध्ये फक्त सापेक्ष एन्कोडर असल्याने ते प्रत्येक स्टार्ट-अपवर त्याच स्थितीत रीसेट केले जाणे आवश्यक आहे. रिसेट करण्यासाठी हाताला सहजपणे चालू आणि बंद करण्यासाठी केबलमध्ये मालिका स्विच जोडणे तुम्हाला फायदेशीर वाटेल.
टीप: Unitree दस्तऐवजीकरण म्हणते की हाताला 20A साठी रेट केले आहे. हे चुकीचे आहे. प्रत्येक वीज पुरवठ्यासाठी 10A SMD फ्यूज मालिकेत जोडलेला आहे. 7.5A फ्यूज वापरल्याने 10A SMD फ्यूज आधी उडेल आणि बदलणे खूप सोपे होईल.
टीप: सिस्टीमवर युनिटरी Z1 हाताच्या अतिरिक्त वजनामुळे समोरचे स्प्रिंग्स हाताला आधार देऊ शकत नाहीत. ड्रॉप-इन 70mm*16mm कॉम्प्रेशन स्प्रिंग्स सापडू शकतात आणि स्टॉक स्प्रिंग्सच्या जागी वापरले जाऊ शकतात. वैकल्पिकरित्या, शॉक व्यापणारे मोठे झरे वापरले जाऊ शकतात.
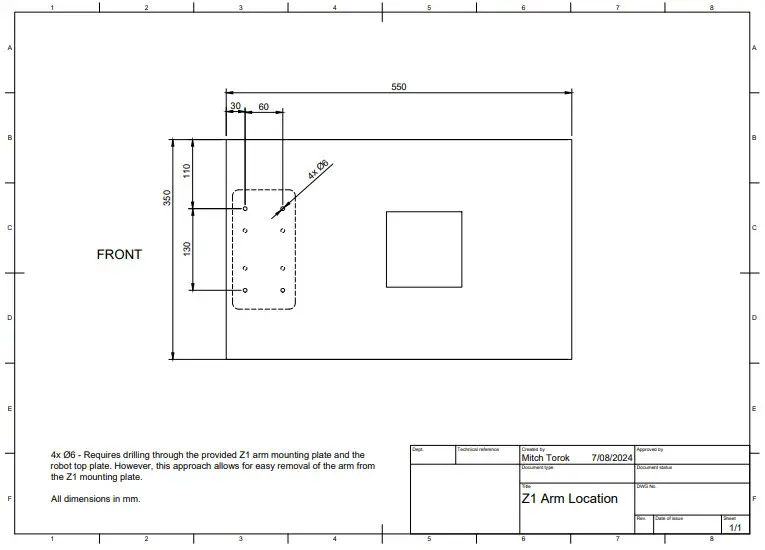
3.2 रोबोटिक आर्म माउंटिंग ड्रॉइंग
3.3 एसampरोबोटिक हातासाठी le कोड
हे वापरकर्ता मॅन्युअल तयार झाल्यावर, Z1 Pro साठी Unitree चे SDK फक्त ROS 1 Melodic किंवा Noetic ला सपोर्ट करते.
पिकरबॉट प्रो उत्पादन संघाने विकसित केले आहेampROS 2 मधील le कोड चेसिसशी सुसंगत.
एसampZ1 प्रो रोबोटिक आर्म चेसिससह समाकलित करण्यासाठी le कोड खालील GitHub रेपॉजिटरीमधून आढळू शकतो:
https://github.com/roboworksdev/pickerbotproarm
www.roboworks.net
कॉपीराइट © 2024 Roboworks. सर्व हक्क राखीव.
कागदपत्रे / संसाधने
 |
ROBOWORKS पिकरबॉट प्रो पिक आणि ड्रॉप मोबाइल रोबोट [pdf] वापरकर्ता मॅन्युअल पिकरबॉट प्रो, पिकरबॉट प्रो पिक आणि ड्रॉप मोबाइल रोबोट, पिक आणि ड्रॉप मोबाइल रोबोट, ड्रॉप मोबाइल रोबोट, मोबाइल रोबोट, रोबोट |