ROBOWORKS N10 रोबोट शैक्षणिक प्रोग्राम करण्यायोग्य मोबाइल रोबोट

तपशील
| उत्पादनाचे नाव | मोटर रिडक्शन रेशो | कमाल गती | वजन | कमाल पेलोड | आकार | किमान वळण त्रिज्या |
|---|---|---|---|---|---|---|
| रोबोट 2 | १६:१० | 1.3 मी/से | 5.92 किलो | 16 किलो | 445*360*206 मिमी | 0.77 मी |
| Rosbot प्रो | १६:१० | 1.65 मी/से | 19.54 किलो | 35 किलो | 774*570*227 मिमी | 1.02 मी |
| Rosbot प्लस | १६:१० | 2.33 मी/से | 35.16 किलो | 22 किलो | 766*671*319 मिमी | 1.29 मी |
बॅटरी आयुष्य आणि वीज पुरवठा:
- रोबोट 2: सुमारे 9.5 तास (लोड नाही), सुमारे 8.5 तास (पूर्ण लोड)
- रोबोट प्रो: सुमारे 4.5 तास (लोड नाही), सुमारे 3 तास (पूर्ण लोड)
- वीज पुरवठा: 24v 6000 mAh बॅटरी + 3A वर्तमान स्मार्ट चार्जर
स्टीयरिंग आणि ड्रायव्हिंग सिस्टम:
मुख्य घटकांमध्ये हे समाविष्ट आहे:
- स्टीयरिंग गियर: S20F 20kg टॉर्क डिजिटल सर्वो
- चाके: WH060 60kg टॉर्क डिजिटल सर्वो, Rosbot 125 साठी 2mm व्यासाची घन रबर चाके, Robot Pro साठी 150mm व्यासाची घन रबर चाके आणि
- एन्कोडर: 500 लाइन एबी फेज उच्च परिशुद्धता एन्कोडर
- सस्पेंशन सिस्टम: रोबोट 2 साठी कोएक्सियल पेंडुलम सस्पेंशन सिस्टम, रोबोट प्रो आणि 4W स्वतंत्र निलंबन प्रणाली
- कंट्रोल इंटरफेस: ब्लूटूथ किंवा वायफाय, PS2, CAN, सिरीयल पोर्ट, USB द्वारे iOS आणि Android ॲप
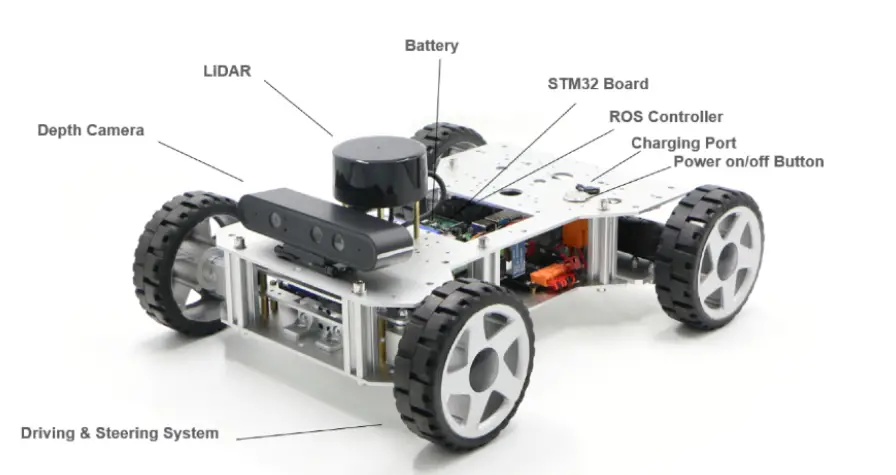
आरओएस नियंत्रकांचा परिचय:
जेश्चर कंट्रोल, स्केलेटन ट्रॅकिंग आणि 3D स्कॅनिंग यासह विविध वापरांसाठी सर्व आररोबोट्स ऑर्बेक ॲस्ट्रा डेप्थ कॅमेरासह सुसज्ज आहेत.
STM32 बोर्ड:
बोर्डमध्ये मेमरी, घड्याळ, रीसेट आणि सप्लाय मॅनेजमेंट, पॉवर डीएमए, डीबग मोड, I/O पोर्ट, टाइमर आणि कम्युनिकेशन इंटरफेस यासह विविध कार्यक्षमतेसह STM32F103RC कोर आहे.
वारंवार विचारले जाणारे प्रश्न
प्रश्न: मी बॅटरी कशी चार्ज करू?
A: RRobot चार्ज करण्यासाठी 3v 24mAh बॅटरीसह प्रदान केलेला 6000A वर्तमान स्मार्ट चार्जर वापरा
प्रश्न: Rosbot Pro चे बॅटरी आयुष्य किती आहे?
A: रोबोट प्रो चे बॅटरी लाइफ सुमारे 4.5 तास आहे ज्यामध्ये कोणतेही लोड नाही आणि पूर्ण लोड स्थितीत सुमारे 3 तास आहे.
प्रश्न: मी स्मार्टफोन वापरून Rosbot नियंत्रित करू शकतो का?
उत्तर: होय, तुम्ही ब्लूटूथ किंवा वायफाय द्वारे iOS आणि Android ॲप वापरून Rosbot नियंत्रित करू शकता.
मुख्य घटक
| Varia% वर | प्रतिमा |
| रोबोट 2 | 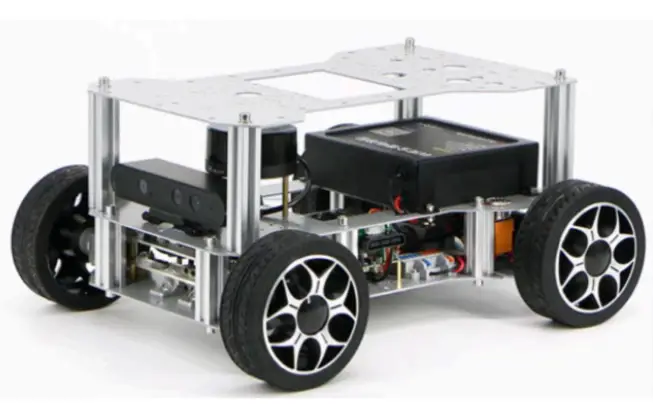 |
| रोबोट प्रो |  |
| रोबोट प्लस |  |
उत्पादन तपशील
|
उत्पादन मॅट्रिक्स |
 |
 |
 |
| उत्पादनाचे नाव | रोबोट 2 | रोबोट प्रो | रोबोट प्लस |
| मोटर रिडक्शन रेशो | १६:१० | १६:१० | १६:१० |
| कमाल गती | 1.3 मी/से | 1.65 मी/से | 2.33 मी/से |
| वजन | 5.92 किलो | 19.54 किलो | 35.16 किलो |
| कमाल पेलोड | 16 किलो | 35 किलो | 22 किलो |
| आकार | 445*360*206 मिमी | 774*570*227 मिमी | 766*671*319 मिमी |
| किमान वळण त्रिज्या | 0.77 मी | 1.02 मी | 1.29 मी |
| बॅटरी आयुष्य | सुमारे 9.5 तास (लोड नाही), सुमारे 8.5 तास (पूर्ण लोड) | सुमारे 4.5 तास (लोड नाही), सुमारे 3 तास (पूर्ण लोड) | |
| वीज पुरवठा | 24v 6000 mAh बॅटरी + 3A वर्तमान स्मार्ट चार्जर | ||
| स्टीयरिंग गियर | S20F 20kg टॉर्क डिजिटल सर्वो | WH060 60kg टॉर्क डिजिटल सर्वो | |
| चाके | 125 मिमी व्यासाचे घन रबर चाके | 150 मिमी व्यासाचे घन रबर चाके | 254 मिमी इन्फ्लेटेबल रबर चाके |
| एन्कोडर | 500 लाइन AB फेज उच्च सुस्पष्टता एन्कोडर | ||
| निलंबन प्रणाली | कोएक्सियल पेंडुलम सस्पेंशन सिस्टम | 4W स्वतंत्र निलंबन प्रणाली | |
| नियंत्रण इंटरफेस | Bluetooth किंवा Wifi, PS2, CAN, सिरीयल पोर्ट, USB द्वारे iOS आणि Android अॅप | ||
ROS नियंत्रकांचा परिचय
Vidia Jetson प्लॅटफॉर्मवर RRobot बेस्ड वापरण्यासाठी 2 प्रकारचे ROS कंट्रोलर उपलब्ध आहेत. जेटसन ओरिन नॅनो संशोधन आणि शिक्षणासाठी अधिक उपयुक्त आहे. Jetson Orin NX उत्पादन प्रोटोटाइपिंग आणि व्यावसायिक अनुप्रयोगांसाठी आदर्श आहे. खालील तक्ता Roboworks कडून उपलब्ध असलेल्या विविध नियंत्रकांमधील मुख्य तांत्रिक फरक स्पष्ट करते. दोन्ही बोर्ड उच्च-स्तरीय गणनेला अनुमती देतात आणि संगणक दृष्टी, सखोल शिक्षण आणि गती नियोजन यासारख्या प्रगत रोबोटिक अनुप्रयोगांसाठी अनुकूल आहेत.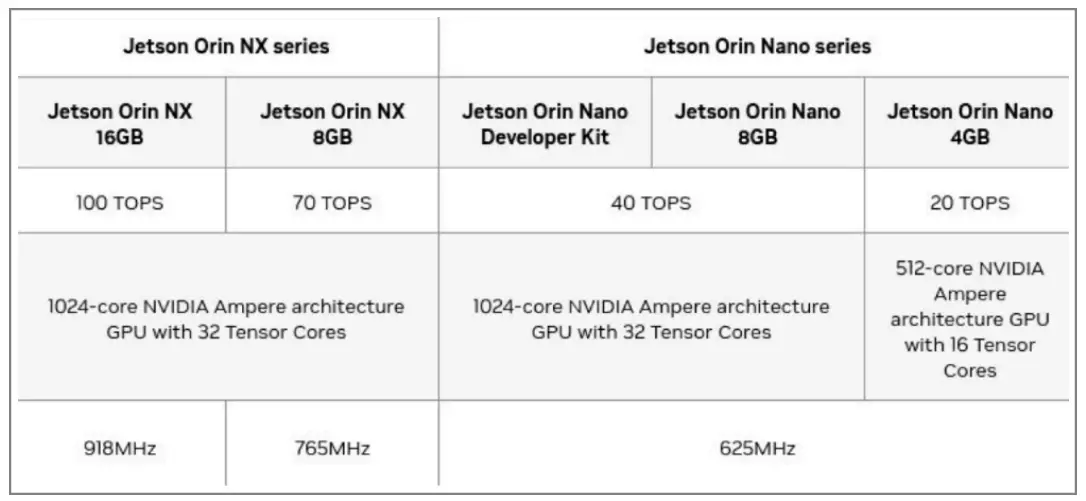
सेन्सिंग सिस्टम: LiDAR आणि डेप्थ कॅमेरा
एक Leishen LSLiDAR N10 किंवा M10 मॉडेल वापरत असलेल्या सर्व Rosbot भिन्नतेवर स्थापित केले आहे. हे LLiDAR 3360-3360-डिग्री स्कॅनिंग आणि सभोवतालची धारणा देतात आणि कॉम्पॅक्ट आणि हलका ESI चा अभिमान बाळगतात. त्यांच्याकडे उच्च सिग्नल नॉइज रेशो आणि उच्च/कमी परावर्तित वस्तूंवर उत्कृष्ट शोध कार्यप्रदर्शन आहे आणि मजबूत प्रकाश परिस्थितीत चांगली कामगिरी करतात. त्यांची शोध श्रेणी 30 मीटर आणि स्कॅन वारंवारता 12Hz आहे. हे LiDAR अखंडपणे रोबोट्समध्ये समाकलित होते, सर्व मॅपिंग आणि नेव्हिगेशनल वापर तुमच्या प्रोजेक्टमध्ये सहज साध्य करता येतात याची खात्री करून. खालील सारणी स्लाइडरच्या तांत्रिक वैशिष्ट्यांचा सारांश देते: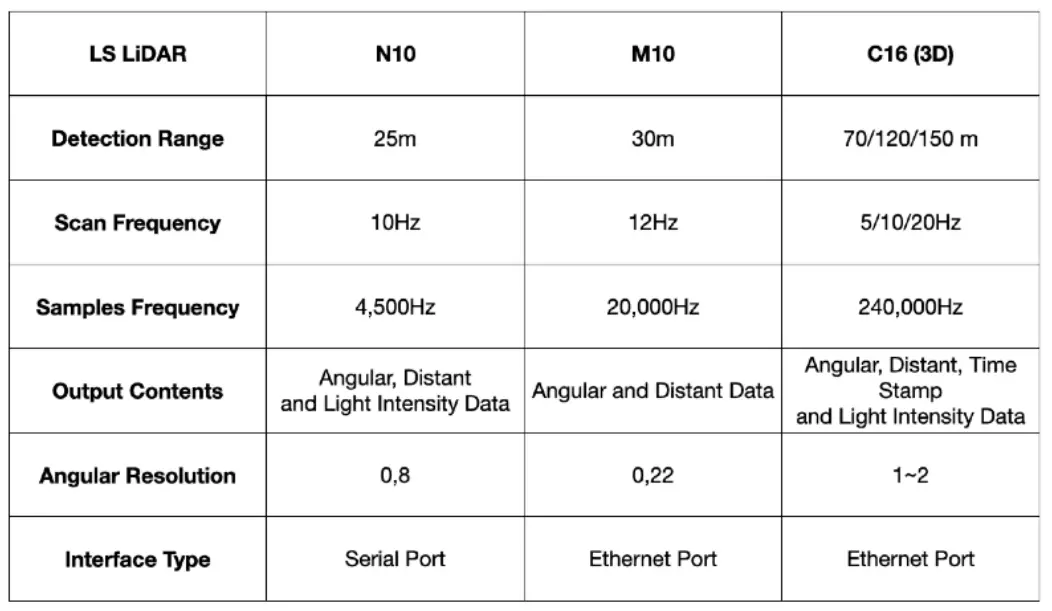
याव्यतिरिक्त, सर्व रोबोट्स ऑर्बेक ॲस्ट्रा डेप्थ कॅमेरासह सुसज्ज आहेत, जो एक RGBD कॅमेरा आहे. हा कॅमेरा जेश्चर कंट्रोल, स्केलेटन ट्रॅकिंग, 3D स्कॅनिंग आणि पॉइंट क्लाउड डेव्हलपमेंटसह अनेक वापरांसाठी ऑप्टिमाइझ केला आहे. खालील तक्त्यामध्ये डेप्थ कॅमेऱ्याच्या तांत्रिक वैशिष्ट्यांचा सारांश दिला आहे.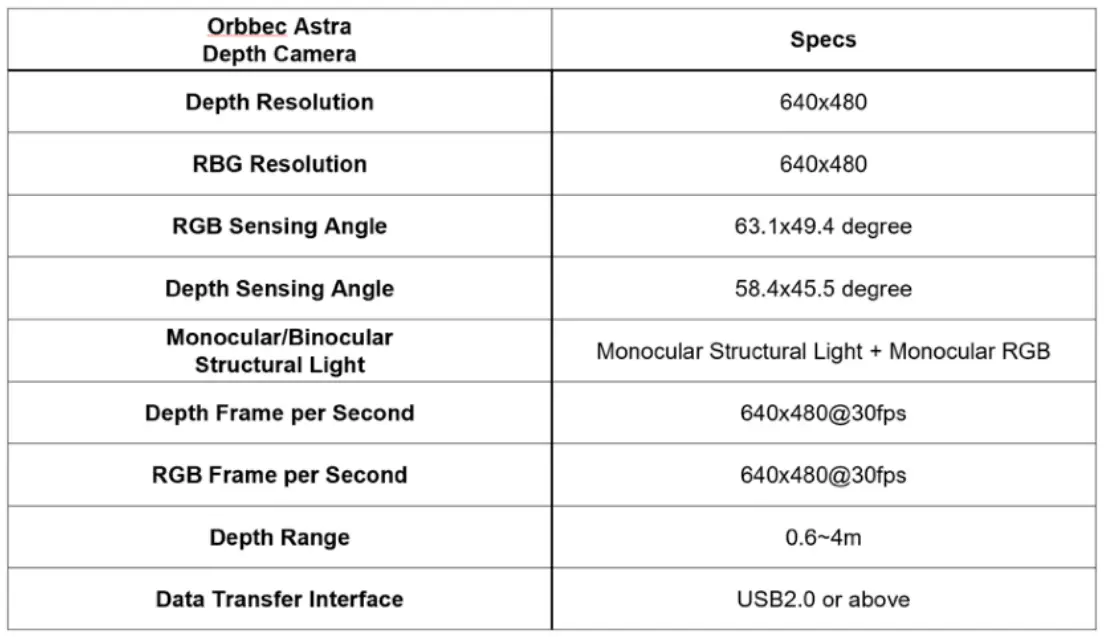
STM32 बोर्ड (मोटर कंट्रोल, पॉवर मॅनेजमेंट आणि IMU)
STM32F103RC बोर्ड हे सर्व Rosbots मध्ये वापरले जाणारे मायक्रोकंट्रोलर आहे. यात उच्च-कार्यक्षमता एआरएम कॉर्टेक्स-एम3 32-बिट RISC कोर आहे जो 72MHz फ्रिक्वेन्सीसह हाय-स्पीड एम्बेडेड मेमरीसह कार्यरत आहे. हे -40°C ते +105°C तापमान श्रेणीमध्ये कार्यरत आहे, जे जगभरातील हवामानातील सर्व रोबोटिक ऍप्लिकेशन्सना अनुकूल आहे. पॉवर-सेव्हिंग मोड आहेत जे कमी-पॉवर ऍप्लिकेशन्सच्या डिझाइनला परवानगी देतात. या मायक्रोकंट्रोलरच्या काही ऍप्लिकेशन्समध्ये मोटर ड्राइव्ह, ऍप्लिकेशन कंट्रोल, रोबोटिक ऍप्लिकेशन्स मेडिकल आणि हॅन्डहेल्ड उपकरणे, पीसी आणि गेमिंग पेरिफेरल्स, GPS प्लॅटफॉर्म, औद्योगिक ऍप्लिकेशन्स, अलार्म सिस्टम व्हिडिओ इंटरकॉम आणि स्कॅनर यांचा समावेश आहे.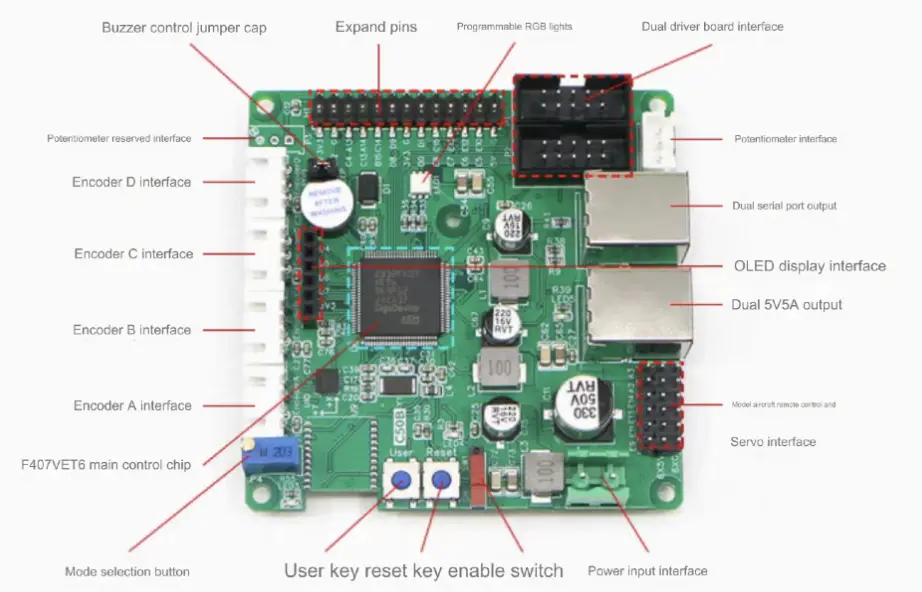
| STM32F103RC | वैशिष्ट्ये |
| कोर | ARM32-बिट कॉर्टेक्स –M3 CPU कमाल गती 72 MHz |
| आठवणी | 512 KB फ्लॅश मेमरी 64kB SRAM |
| घड्याळ, रीसेट आणि पुरवठा व्यवस्थापन | 2.0 ते 3.6 V अनुप्रयोग पुरवठा आणि I/Os |
|
शक्ती |
स्लीप, स्टॉप आणि स्टँडबाय मोड
RTC आणि बॅकअप रजिस्टरसाठी V पुरवठा बॅट |
| DMA | 12-चॅनेल डीएमए नियंत्रक |
| डीबग मोड | SWD आणि जेTAG इंटरफेस कॉर्टेक्स-एम3 एम्बेडेड ट्रेस मॅक्रोसेल |
| I/O पोर्ट | 51 I/O पोर्ट (16 बाह्य व्यत्यय वेक्टरवर मॅप करण्यायोग्य आणि 5V सहनशील) |
|
टाइमर |
4×16-बिट टाइमर
2 x 16-बिट मोटर कंट्रोल PWM टाइमर (इमर्जन्सी स्टॉपसह) 2 x वॉचडॉग टाइमर (स्वतंत्र आणि विंडो) SysTick टाइमर (24-बिट डाउन काउंटर) DAC चालविण्यासाठी 2 x 16-बिट मूलभूत टाइमर |
|
संप्रेषण इंटरफेस |
USB 2.0 फुल-स्पीड इंटरफेस SDIO इंटरफेस
CAN इंटरफेस (2.0B सक्रिय) |
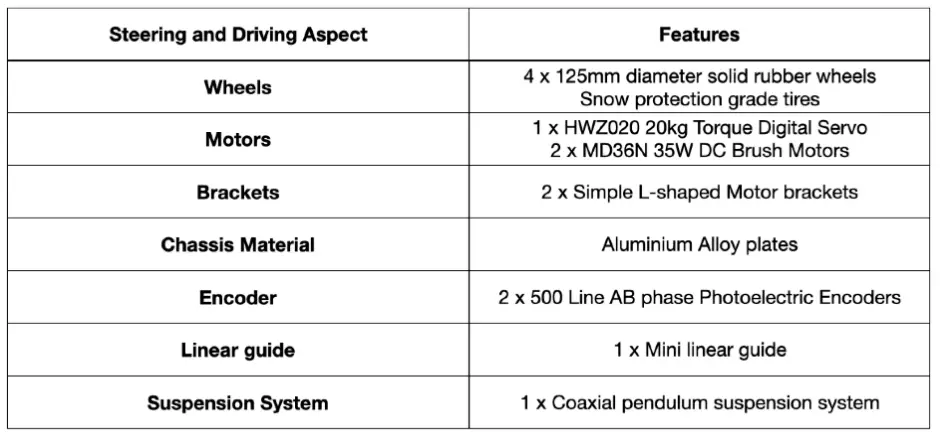
स्टीयरिंग आणि ड्रायव्हिंग सिस्टम
स्टीयरिंग आणि ड्रायव्हिंग सिस्टीम हे रोबोटच्या डिझाइन आणि बिल्डमध्ये एकत्रित केले आहे. खरेदी केलेल्या मॉडेलच्या आधारावर ते 2-व्हील किंवा 4-व्हील ड्राइव्ह असेल, दोन्ही पर्याय विविध संशोधन आणि विकास हेतूंसाठी योग्य असतील. सर्व रोबोट्सवरील चाके बर्फ-संरक्षण ग्रेड टायर्ससह घन रबर आहेत. एक कोएक्सियल पेंडुलम सस्पेंशन सिस्टीम आहे आणि रेंज रोबोट्स स्वतंत्र सस्पेंशन सिस्टीमसह शॉक शोषकांनी सुसज्ज आहेत, ज्यामुळे ते कठीण भूभागावर यशस्वीरित्या नेव्हिगेट करू शकतात.
स्टीयरिंग आणि ड्रायव्हिंग तांत्रिक वैशिष्ट्ये:
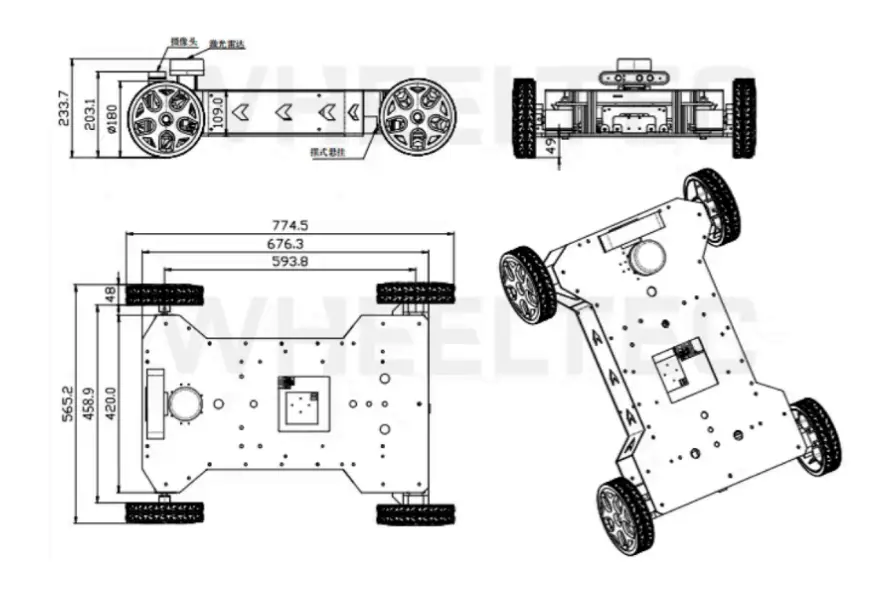
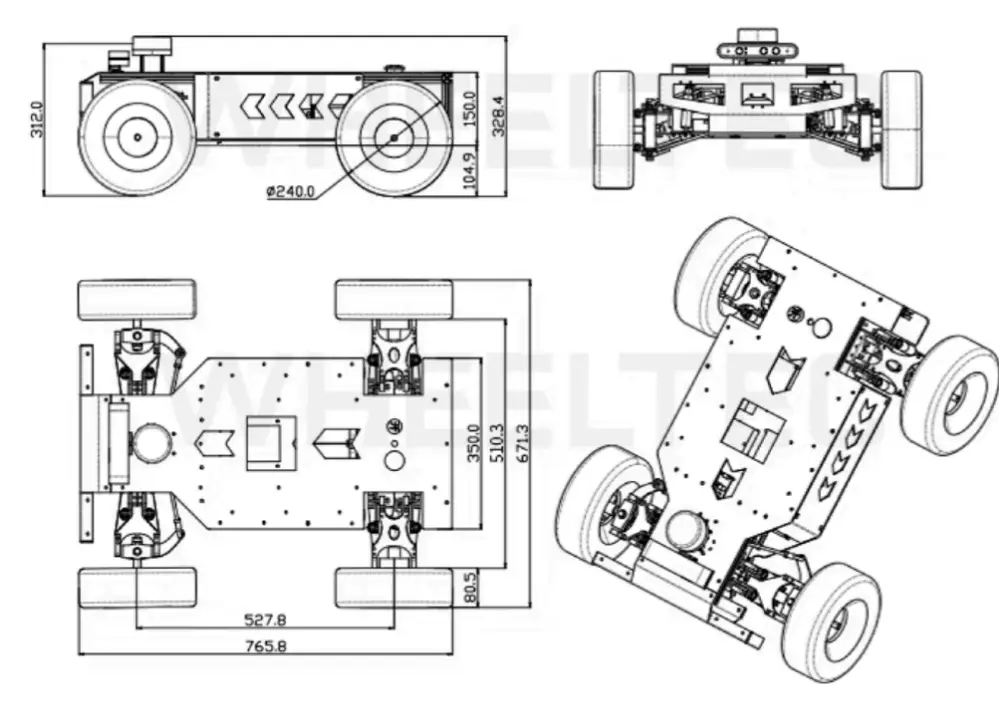
रोबोट चेसिस डिझाइन आकृती:
रोबोट 2

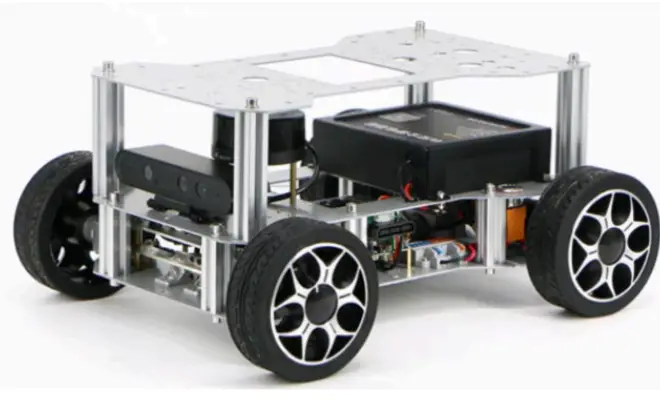
रोबोट प्रो
रोबोट प्लस
पॉवर व्यवस्थापन
पॉवर मॅग - चुंबकीय एलएफपी बॅटरी:
सर्व Rosbots 6000 mAh पॉवर मॅग, चुंबकीय LFP (लिथियम आयर्न फॉस्फेट) बॅटरी आणि पॉवर चार्जरसह येतात. ग्राहक अतिरिक्त खर्चात बॅटरी 20000 mAh पर्यंत अपग्रेड करू शकतात. LFP बॅटरी या लिथियम-आयन बॅटरीचा एक प्रकार आहे ज्या त्यांच्या स्थिरता, सुरक्षितता आणि दीर्घ सायकल आयुष्यासाठी ओळखल्या जातात. कोबाल्ट किंवा निकेल वापरणाऱ्या पारंपारिक लिथियम-आयन बॅटरीच्या विपरीत, एलएफपी बॅटरी लोह फॉस्फेटवर अवलंबून असतात, अधिक टिकाऊ आणि कमी विषारी पर्याय देतात. ते थर्मल रनअवेसाठी अत्यंत प्रतिरोधक आहेत, ओव्हरहाटिंग आणि आगीचा धोका कमी करतात. इतर लिथियम-आयन बॅटरीच्या तुलनेत त्यांची उर्जा घनता कमी असली तरी, LFP बॅटरी टिकाऊपणामध्ये उत्कृष्ट आहेत, दीर्घ आयुष्यासह, जलद चार्जिंगसह आणि अत्यंत तापमानात चांगली कामगिरी करतात, ज्यामुळे त्यांना इलेक्ट्रिक वाहने (EVs) आणि ऊर्जा साठवण प्रणालीसाठी आदर्श बनते. पॉवर मॅग रोबोटच्या कोणत्याही धातूच्या पृष्ठभागावर त्याच्या चुंबकीय बेस डिझाइनमुळे संलग्न केला जाऊ शकतो. हे बॅटरी जलद आणि सोपे बदलते.
तांत्रिक तपशील:
| मॉडेल | 6000 mAh | 20000 mAh |
| बॅटरी पॅक |
22.4V 6000mAh |
22.4V 20000mAh |
|
मूळ साहित्य |
लिथियम लोह फॉस्फेट |
लिथियम लोह फॉस्फेट |
| कटऑफ खंडtage | 16.5 व्ही | 16.5 व्ही |
|
पूर्ण खंडtage |
25.55 व्ही |
25.55 व्ही |
| चार्जिंग करंट | 3A | 3A |
| शेल साहित्य |
धातू |
धातू |
| डिस्चार्ज कामगिरी | १५अ सतत डिस्चार्ज | १५अ सतत डिस्चार्ज |
|
प्लग |
DC4017MM महिला कनेक्टर (चार्जिंग) XT60U-F महिला कनेक्टर (डिस्चार्जिंग) |
DC4017MM महिला कनेक्टर (चार्जिंग) XT60U-F महिला कनेक्टर (डिस्चार्जिंग) |
|
आकार |
177*146*42 मिमी |
208*154*97 मिमी |
|
वजन |
1.72 किलो |
4.1 किलो |
बॅटरी संरक्षण
शॉर्ट सर्किट, ओव्हरकरंट, ओव्हरचार्ज, ओव्हर-डिस्चार्ज प्रोटेक्शन, वापरताना चार्जिंगला सपोर्ट, बिल्ट-इन सेफ्टी व्हॉल्व्ह, फ्लेम रिटार्डंट बोर्ड.
ऑटो चार्जिंग स्टेशन (पॉवर+):
ऑटो चार्जिंग स्टेशन Rosbot 2+ मॉडेलसह एकत्रित केले आहे आणि Rosbot 2, Rosbot Pro आणि Rosbot Plus सह काम करण्यासाठी स्वतंत्रपणे खरेदी केले जाऊ शकते.
ROS 2 द्रुत प्रारंभ
जेव्हा रोबोट प्रथम चालू केला जातो, तेव्हा तो डीफॉल्टनुसार ROS द्वारे नियंत्रित केला जातो. याचा अर्थ, STM32 चेसिस कंट्रोलर बोर्ड ROS 2 कंट्रोलर - द जेटसन ओरिन कडून आदेश स्वीकारतो. प्रारंभिक सेटअप जलद आणि सोपे आहे, तुमच्या होस्ट PC वरून (Ubuntu Linux शिफारस केलेले) रोबोटच्या Wi-Fi हॉटस्पॉटशी कनेक्ट करा. डीफॉल्टनुसार पासवर्ड हा “डोंग्गुआन” आहे. पुढे, लिनक्सटरमिनेट l द्वारे SSH वापरून रोबोटशी कनेक्ट करा, P पत्ता 192.168.0.10 आणि 0 आहे आणि डीफॉल्ट पासवर्ड डोंगगुआन आहे.
रोबोटच्या टर्मिनल ऍक्सेससह, तुम्ही ROS 2 वर्कस्पेस फोल्डरमध्ये नेव्हिगेट करू शकता, "wheeltec_ROS 2" अंतर्गत चाचणी प्रोग्राम्स चालवण्यापूर्वी, wheeltec_ROS 2/turn_on_wheeltec_robot/ वर नेव्हिगेट करा आणि wheeltec_udev.sh शोधा - ही स्क्रिप्ट चालविली जाणे आवश्यक आहे, सामान्यत: फक्त एकदाच. परिधीयांचे योग्य कॉन्फिगरेशन सुनिश्चित करा. तुम्ही आता रोबोटच्या कार्यक्षमतेची चाचणी घेण्यास सक्षम आहात, ROS 2 कंट्रोलर कार्यक्षमता लाँच करण्यासाठी, चालवा: “रिलाँच turn_on_wheeltec_robot turn_on_wheeltec_robot.launch”
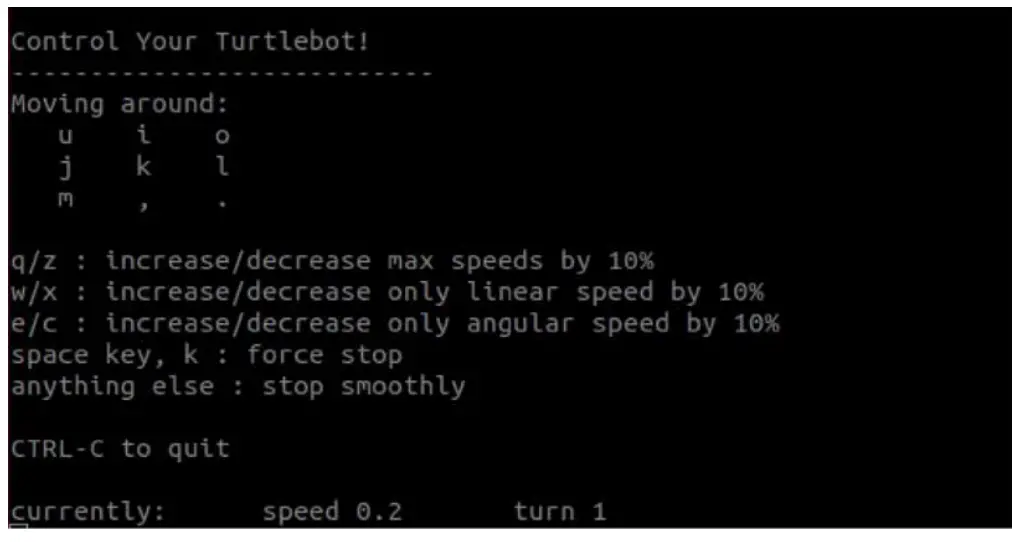
दुसऱ्या टर्मिनलमध्ये, तुम्ही चेसिस कंट्रोल प्रमाणित करण्यासाठी keyboard_teleop नोड वापरू शकता, ही लोकप्रिय ROS 2 Turtlebot ex ची सुधारित आवृत्ती आहे.ampले प्रकार: “wheeltec_robot_rc keyboard_teleop.launch पुन्हा लाँच करा”
पूर्व-स्थापित ROS 2 नम्र पॅकेजेस
खाली खालील वापरकर्ता-केंद्रित पॅकेजेस आहेत, इतर पॅकेजेस उपस्थित असू शकतात, हे फक्त अवलंबित्व आहेत.
- टर्न_ऑन_व्हीलटेक_रोबोट
चेसिस कंट्रोलरसह रोबोट कार्यक्षमता आणि संवाद सक्षम करण्यासाठी हे पॅकेज महत्त्वपूर्ण आहे. प्राथमिक स्क्रिप्ट “turn_on_wheeltec_robot.launch” प्रत्येक बूटवर ROS 2 आणि cthe ऑनट्रोलर कॉन्फिगर करण्यासाठी वापरली जाणे आवश्यक आहे. - wheeltec_rviz2
प्रक्षेपण समाविष्टीत आहे filePickerbot Pro साठी सानुकूल कॉन्फिगरेशनसह उदा लाँच करणार आहे. - wheeltec_robot_slam
पिकरबॉट प्रो साठी सानुकूल कॉन्फिगरेशनसह SLAM मॅपिंग आणि स्थानिकीकरण पॅकेज. - wheeltec_robot_rrt2
यादृच्छिक वृक्ष अल्गोरिदम वेगाने एक्सप्लोर करणे - हे पॅकेज पिकरबॉट प्रो ला एक्सप्लोरेशन नोड्स लाँच करून, त्याच्या इच्छित स्थानावर जाण्यासाठी मार्गाची योजना करण्यास सक्षम करते. - wheeltec_robot_keyboard
रोबोट कार्यक्षमता प्रमाणित करण्यासाठी आणि कीबोर्ड वापरून नियंत्रित करण्यासाठी सोयीस्कर पॅकेज, रिमोट होस्ट पीसीसह. - wheeltec_robot_nav2
ROS 2 नेव्हिगेशन 2 नोड पॅकेज. - wheeltec_lidar_ros2
Leishen M2/N10 कॉन्फिगर करण्यासाठी ROS 10 Lidar पॅकेज. - wheeltec_joy
जॉयस्टिक कंट्रोल पॅकेजमध्ये लॉन्च समाविष्ट आहे fileजॉयस्टिक नोड्ससाठी s. - simple_follower_ros2
लेसर स्कॅन किंवा डेप्थ कॅमेरा वापरून अल्गोरिदम खालील मूलभूत ऑब्जेक्ट आणि लाइन. - ros2_astra_camera
ड्रायव्हर्स आणि लॉन्चसह ॲस्ट्रा डेप्थ कॅमेरा पॅकेज files.
सारांश
रोबोट हे आरओएस (रोबोट ऑपरेटिंग सिस्टम) विकासक, शिक्षक आणि विद्यार्थ्यांसाठी डिझाइन केलेले आहे. Rosbot चे हृदय सर्वात लोकप्रिय रोबोटिक प्लॅटफॉर्म - ROS वर आधारित पूर्णपणे प्रोग्राम करण्यायोग्य सॉफ्टवेअर फ्रेमवर्क आणि कॉन्फिगर करण्यायोग्य हार्डवेअर आर्किटेक्चर आहे.
रोबोट तीन श्रेणींमध्ये येतो:
- रोबोट 2 - आरओएस नवशिक्यांसाठी आणि कमी-बजेट प्रकल्पांसाठी योग्य.
- रोबोट प्रो - ROS डेव्हलपर आणि शिक्षकांसाठी योग्य ज्यांना जलद प्रोटोटाइपिंग किंवा शिकवण्यासाठी अष्टपैलू प्रणाली आवश्यक आहे.
- Rosbot Plus - स्वतंत्र निलंबन प्रणालीसह ही Rosbot ची 4WD आवृत्ती आहे. ही श्रेणी औद्योगिक आणि व्यावसायिक विकासासाठी विचारात घेण्यासारखी गंभीर आहे. रोबोट लोकप्रिय ROS नियंत्रकांसह येतो जसे की:
- जेटसन ओरिन नॅनो
- जेटसन ओरिन एनएक्स
द्वारा तयारः वेन लिऊ, रेली स्मिथर्स आणि तारा हर्कझ 30 सप्टेंबर 2024
आवृत्ती #: 20240930
कागदपत्रे / संसाधने
 |
ROBOWORKS N10 रोबोट शैक्षणिक प्रोग्राम करण्यायोग्य मोबाइल रोबोट [pdf] वापरकर्ता मॅन्युअल N10 रोबोट शैक्षणिक प्रोग्राम करण्यायोग्य मोबाइल रोबोट, N10, रोबोट शैक्षणिक प्रोग्राम करण्यायोग्य मोबाइल रोबोट, शैक्षणिक प्रोग्राम करण्यायोग्य मोबाइल रोबोट, प्रोग्राम करण्यायोग्य मोबाइल रोबोट, मोबाइल रोबोट, रोबोट |