प्रतिमा अभियांत्रिकी STEVE-6D वापरकर्ता पुस्तिका

1 परिचय
STEVE-6D सॉफ्टवेअर डिजिटल कॅमेऱ्यांच्या प्रतिमा स्थिरीकरण कार्यक्षमतेचे मूल्यांकन करते. खालील प्रतिमा माजी दर्शवतेampTE261 चाचणी चार्ट वापरून कमी-कॉन्ट्रास्ट तिरकस कडांचे विश्लेषण करण्यासाठी le सेटअप. कॅमेरा STEVE-6D वर आरोहित केला जातो आणि वेगवेगळ्या एक्सपोजर वेळी प्रतिमा कॅप्चर करण्यासाठी कॅमेऱ्याचे इमेज स्टॅबिलायझेशन फंक्शन चालू आणि बंद असताना कंपन केले जाते. येथून, सॉफ्टवेअर अस्पष्ट तिरकस कडांच्या काठाच्या रुंदीचे विश्लेषण करते आणि नंतर एफ-स्टॉप्समध्ये स्थिरीकरण कामगिरीची गणना करते. हे सॉफ्टवेअर iQ-ट्रिगर आणि STEVE-6D हार्डवेअरला साइन वेव्ह जनरेटर, कस्टम यूजर वेव्हफॉर्म्स किंवा CIPA कस्टम हँडशेकसह नियंत्रित करू शकते.

STEVE-6D - टर्नकी सोल्यूशन
ग्राफिकल यूजर इंटरफेस
STEVE-6D सॉफ्टवेअर दोन प्रमुख मॉड्यूल्समध्ये विभागले गेले आहे, एक STEVE-6D हार्डवेअरशी संप्रेषणासाठी आणि दुसरे प्रतिमा स्थिरीकरण कामगिरी गणना [१].

STEVE-6D च्या कंपन नियंत्रणासाठी मॉड्यूल
कंपन नियंत्रण मॉड्यूल
"व्हायब्रेशन कंट्रोल" मॉड्यूल वेव्हफॉर्म डेटा सेट करते आणि दरम्यान इंटरफेस व्यवस्थापित करते
STEVE-6D आणि iQ-ट्रिगर. “कंपन नियंत्रण” चार वेगवेगळ्या भागांमध्ये विभागले गेले आहे, पहिला भाग [२] खालील टॅबमध्ये बदलतो.
कनेक्शन टॅब
STEVE-6D सह कनेक्शन मिळविण्यासाठी, "कनेक्ट" बटणावर क्लिक करा [1], आणि STEVE-6D सर्व सहा अक्षांना शून्य स्थानावर आपोआप संदर्भ देईल. डिस्कनेक्ट करण्यासाठी, लाल बटण [2] वर क्लिक करा
बरोबर माहिती आयटम [3] वर माउस कर्सर फिरवल्याने टूलटिपमधील अनुक्रमांक आणि फर्मवेअर आवृत्ती यासारखी कनेक्टेड कंट्रोलरची माहिती उघड होईल.

कनेक्शन टॅब
प्रीसेट टॅब
रोटेशन पॉइंट, जो पिव्होट पॉइंट [१] म्हणून ओळखला जातो, आणि स्थानिक होम/शून्य स्थान [२] परिभाषित करून कॅमेरा प्रणाली सहजपणे संरेखित केली जाऊ शकते. प्रत्येक वेव्हफॉर्म डेटा वक्र या स्थितीचा संदर्भ देते.
डीफॉल्ट पिव्होट पॉइंट (x=y=z=0) रिटेनिंग प्लेटच्या तळाच्या मध्यभागी स्थित आहे. तुम्ही तुमच्या अॅप्लिकेशनसाठी सर्वोत्तम काय आहे यावर तुम्ही त्याची स्थिती बदलू शकता. उदाample, मोबाइल फोनसह, फोनच्या मध्यभागी पिव्होट पॉइंट सेट करणे अर्थपूर्ण आहे कारण जेव्हा वापरकर्ता तो धरतो तेव्हा हे सामान्यतः रोटेशनचे केंद्र असते. तथापि, SLR कॅमेर्यामध्ये त्याच्या अगदी भिन्न भूमितीमुळे कदाचित भिन्न रोटेशन केंद्र आहे

प्रीसेट टॅब
साइन वेव्हफॉर्म टॅब
प्रत्येक अक्षासाठी साइन वेव्ह जनरेटर वेव्हफॉर्म डेटा सेट करण्याचा एक द्रुत मार्ग तयार करतो. नवीन वेव्हफॉर्म परिभाषित करण्यासाठी, स्थिती [२], वारंवारता [३] संबंधित ऑफसेटची मूल्ये बदला. ampलिट्यूड [४], आणि
वेळ ऑफसेट [5]. “सायकल” [६] स्पिन बॉक्स किती वेळा साइनची पुनरावृत्ती करावी हे परिभाषित करते. वेव्हफॉर्म करण्यासाठी, "हलवा" बटणावर क्लिक करा. खालच्या उजव्या कोपऱ्यातील बटणावर क्लिक करा [७].
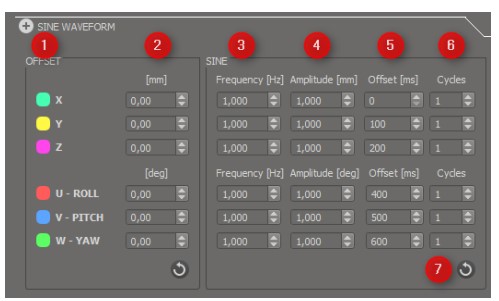
साइन वेव्हफॉर्म टॅब
CIPA हँडशेक टॅब
तीनपैकी कोणतेही CIPA हँडशेक करण्यासाठी, प्रथम, ऑप्टिकल सिस्टमचे वजन निवडा. तेथून, वेव्हफॉर्म डेटा स्वयंचलितपणे STEVE-6D कंट्रोलरवर अपलोड केला जातो आणि हालचाल सुरू होते
जेव्हा हलवा बटण क्लिक केले जाते. सीआयपीए नॉनडिक्लोजर करारामुळे, “वेव्हफॉर्म प्लॉट” फक्त एक माजी आहेample
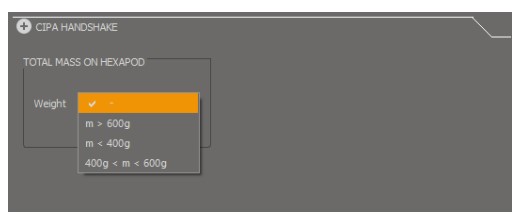
CIPA हँडशेक टॅब
सानुकूल वेव्हफॉर्म टॅब
मानक वेव्हफॉर्मद्वारे
एक साधी .txt तयार करून STEVE-6D वर सानुकूल वेव्हफॉर्म अपलोड करा file कार्टेशियन निर्देशांकांसह. सर्व मूल्ये टॅब स्टॉपसह विभक्त करणे आवश्यक आहे. अक्ष क्रम XYZUV W आहे. s सेट कराampSTEVE-6D सॉफ्टवेअरमधील वेव्हफॉर्मचा लिंग रेट आणि नंतर .txt लोड करा file सॉफ्टवेअरला. सर्व निर्देशांक मुख्य बिंदू आणि होमिंग स्थितीकडे दुर्लक्ष करून आहेत. .txt नंतर वेव्हफॉर्म अपलोड स्वयंचलितपणे सुरू होते file STEVE-6D सॉफ्टवेअरमध्ये लोड केले आहे. File मानक वेव्हफॉर्मची व्याख्या: (विभाजक म्हणून टॅब वापरा)

स्थानिक डेटाद्वारे
स्मार्टफोन (एक्सेलेरोमीटर, जायरोस्कोप, मॅग्नेटोमीटर) सारख्या उपकरणांचे विश्लेषण करताना अवकाशीय सेन्सर डेटा वापरा. अधिक अचूक रोटेशन मूल्ये मिळविण्यासाठी, Acc/Mag आणि Gyr प्रकारासाठी पॅरामीटर सेट करा.
द ampलिट्यूड गेन फक्त स्केलिंगसाठी आहे ampलिट्यूड सर्व पॅरामीटर्स सेट केल्यानंतर, हालचाली सुरू करण्यासाठी हेक्सापॉडवर अपलोड करा बटणावर क्लिक करा. सतत चालू ठेवता येण्याजोगा चेकबॉक्स वापरकर्त्याला वेव्हफॉर्म सुरू ठेवण्यासाठी कालावधी सेट करण्यास अनुमती देईल जोपर्यंत सुरुवातीची स्थिती शेवटच्या स्थितीपेक्षा वेगळी असेल. फक्त एक्सीलरोमीटर किंवा जायरोस्कोप डेटा वापरण्याचा पर्याय देखील आहे.
निर्यात वेव्हफॉर्म बटणाचा उपयोग वेव्हफॉर्म जतन करण्यासाठी आणि IS कार्यप्रदर्शन गणनासाठी केला जाऊ शकतो. डेटा एसampलिंग दर 1000Hz आहे
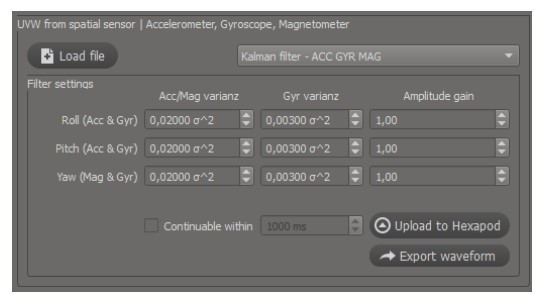
अवकाशीय सेन्सर सेटिंग्ज
File अवकाशीय सेन्सरवरून UVW साठी व्याख्या:
| ह: मिमी: एसएस.झ्झझ्झ | AccX[जी] | अॅक्सवाय[ग्रॅम] | अक्झॅड[ग्रॅम] | GyrX[rad/s] | GyrX[rad/s] | GyrX[rad/s] | माग[µt] | माग[µt] | माग[µt] |
ट्रिगर टॅब
iQ-Trigger सह रिमोट कॅमेरा रिलीझ करता येतो. "वेव्हफॉर्म प्लॉट" वर क्लिक करून किंवा iQ-ट्रिगर टॅब [३] मधील वेळ व्यक्तिचलितपणे निवडून एकाधिक प्रकाशन वेळा परिभाषित करणे शक्य आहे. यादृच्छिक प्रकाशन वेळ आवश्यक असल्यास, प्रति वेव्हफॉर्म [२] रिलीझची संख्या परिभाषित करा. प्रत्येक iQ-ट्रिगर रिलीझ शूटिंग लॅग, रिलीज कालावधी आणि दोन कॅमेरा रिलीज दरम्यान डेल्टा वेळ द्वारे परिभाषित केले जाते [3].

उभ्या रेषा डिजिटस प्रकाशन वेळा दर्शवतात
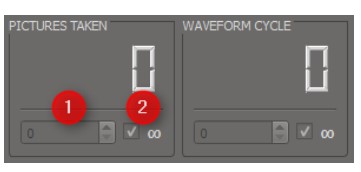
हार्डवेअर, स्थिती आणि प्रतिमा/वेव्हफॉर्म संख्या पाठवा
कनेक्शन स्थिती किंवा त्रुटींबद्दल सर्व माहिती "STATUS" भागात प्रदर्शित केली जाते. चळवळ सुरू करण्यासाठी, "हलवा" बटण दाबा. "होम पोझिशन" बटणावर क्लिक करून, STEVE-6D थेट होमिंग पोझिशनवर जातो, जे आधी "प्रीसेट" टॅबमध्ये सेट केले होते. STEVE-6D पुन्हा कॅलिब्रेट करणे आवश्यक असल्यास, "संदर्भ प्लॅटफॉर्म" बटणावर क्लिक करा. "चित्र घेतले" किंवा "वेव्हफॉर्म सायकल" साठी मूल्य परिभाषित करताना, STEVE-6D ची गती स्वयंचलितपणे थांबवणे शक्य आहे. मूल्य अमर्यादित [२] वर सेट करा किंवा संख्यांच्या संख्येसाठी मूल्य निवडा [१] iQ-ट्रिगरने ट्रिगर केले पाहिजे किंवा वेव्हफॉर्म कार्यान्वित केले पाहिजे.
डेटाचे विश्लेषण करा
"डेटा विश्लेषित करा" मॉड्यूल प्रतिमा स्थिरीकरण गणना करते. या मॉड्यूलमध्ये तीन महत्त्वपूर्ण भाग आहेत. पहिला भाग "मेटाडेटा टूल" [१] आहे, जो कॅमेरा मेटाडेटा सेट करतो. दुसरा
भाग IS-कार्यप्रदर्शन गणना [२] साठी प्रतिमा बॅच प्रक्रिया आहे. अंतिम भाग कॅप्चर केलेल्या प्रतिमांचे परिणाम प्रदर्शित करतो.
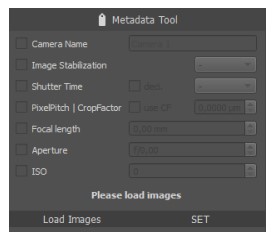
मेटाडेटा
पिक्सेल पिच आणि शटर वेळ यासारख्या IS-कार्यप्रदर्शन गणनासाठी कॅमेरा मेटाडेटा माहिती असणे आवश्यक आहे. कॅमेरा ही माहिती इमेजमध्ये रेकॉर्ड करत नसल्यास file, प्रतिमांचा एक बॅच लोड करा आणि .jpg प्रतिमेमध्ये व्यक्तिचलितपणे लिहा. प्रतिमा लोड करा, पॅरामीटर्स सेट करा आणि नंतर “SET” बटण दाबा.
फक्त JPEG प्रतिमांसाठी
IS-कार्यप्रदर्शन गणनासाठी प्रतिमा लोड करा
संदर्भ मालिका लोड झाल्यावर, IS-ON साठी चाचणी मालिका निवडा. ISOFF साठी किमान एक प्रतिमा मालिका आवश्यक आहे. जर CIPA हँडशेक वेव्हफॉर्म वापरला असेल, तर IS-OFF साठी चाचणी मालिकेची आवश्यकता नाही.
त्याऐवजी, CIPA साठी बटण क्लिक करा आणि नंतर कॅमेरा वजन निवडा. सानुकूल मोशन डेटा बटणावर क्लिक करून सानुकूल वेव्हफॉर्म मापनातील प्रतिमा लोड केल्या जाऊ शकतात. "प्रतिमा केंद्राचे विश्लेषण करा
फक्त” चेकबॉक्स जलद परंतु कमी अचूक डेटासाठी उपलब्ध आहे. हा पर्याय निवडताना, मोजणी दरम्यान फक्त मध्य किनारी बॉक्स वापरला जातो.

पर्याय निवडल्यानंतर, एक झाड view खाली पाहिल्याप्रमाणे भिन्न मालिका दिसतील. कोणताही इमेज मेटाडेटा उपलब्ध नसल्यास, "मेटाडेटा टूल" वापरा, जे त्रुटी संदेशाद्वारे सूचित केले आहे
STEVE-6D सॉफ्टवेअरवर प्रतिमा लोड केल्यानंतर. एकदा पूर्ण झाल्यावर, "प्रक्रिया" बटणावर क्लिक करून प्रतिमा स्थिरीकरण कार्यप्रदर्शन गणना सुरू केली जाऊ शकते. एक परिणाम file सिंगल एज रुंदीची गणना प्रतिमांसह फोल्डरमध्ये जतन केली जाईल.
| संपण्याची वेळ | खेळपट्टी [पिक्स] | जांभई [पिक्स] | वर्ग (p^2+y^2) |
IS-कार्यप्रदर्शन
काठाची रुंदी μm वि. एक्सपोजर वेळ मधील IS-कार्यप्रदर्शनाची गणना करते. ISON आणि IS-OFF (किंवा मोशन डेटा) मालिकेतील काठाची रुंदी पोस्टकार्डच्या आकारात रूपांतरित केली जाते. viewही प्रक्रिया पूर्ण करण्यासाठी 65-80 सेमी अंतर ठेवा. एफ-स्टॉप [२] मधील प्रतिमा स्थिरीकरण कार्यप्रदर्शन 2μm [१] च्या निर्धार मर्यादेसह IS-ON आणि IS-OFF वक्र च्या छेदनबिंदूंद्वारे स्थित आहे. IS-कार्यप्रदर्शनाचे संख्यात्मक मूल्य एफ-स्टॉपमध्ये प्रदर्शित केले जाते.

परिणाम डेटा निवड
IS-कार्यप्रदर्शन गणनाचे एकल परिणाम निवडण्यासाठी, “SERIES,” साठी स्लाइडरपैकी एक [1] हलवा.
"एक्सपोजर वेळ," "चित्र," किंवा "ROI" (रुचीचा प्रदेश). ही हालचाल प्रदर्शित बदलेल
एज स्प्रेड फंक्शन (“ESF”) [३], अवकाशीय वारंवारता प्रतिसाद (“SFR”) [४], आणि
“इनपुट इमेज” [५] टॅब. तपशीलवार माहिती “INFO” बटणासह दर्शविली किंवा लपवली जाऊ शकते [5].

एज स्प्रेड फंक्शन (ESF)
ESF प्रत्येक काठाच्या रुंदीची गणना करते. अशा प्रकारे, एक षटकेampप्रतिमेचा led तिरकस किनारा ROI प्रत्येक प्रतिमेवरून मोजला जातो. प्रत्येक प्रतिमेमध्ये वीस तिरकस कडा असतात, ज्यामध्ये खेळपट्टीतील दहा आणि
जांभई दिशेने दहा.
अवकाशीय वारंवारता प्रतिसाद (SFR)
SFR चा वापर IS-कार्यप्रदर्शन गणनासाठी केला जात नाही. त्याऐवजी, ते प्रत्येक ROI च्या मॉड्युलेशन ट्रान्सफर फंक्शनचे वर्णन करते.
इनपुट प्रतिमा आणि ROI निवड
प्रत्येक निकालासाठी स्वारस्य असलेले क्षेत्र बदलणे किंवा प्रदर्शित करणे शक्य आहे. “ROI संपादित करा” बटणावर क्लिक करा आणि ROI चे स्थान बदला. नवीन ROI सेट करण्यासाठी, बटणावर क्लिक करा आणि ROI हटवण्यासाठी "-" बटण वापरा. झूमिंग इफेक्टसाठी, “झूम +” बटणावर क्लिक करा आणि प्रतिमेवर एक आयत काढा.
हाताळणी त्रुटी
जर सॉफ्टवेअरला एका इमेजवर सर्व 20 ROI आढळले नाहीत, तर इनपुट इमेज लिस्ट दरम्यान एक त्रुटी आली आहे. view. असे झाल्यास, कृपया प्रतिमा निवडा आणि प्रतिमेसाठी गहाळ ROI व्यक्तिचलितपणे परिभाषित करा.
Cअधिकार Iमाहिती
हे सॉफ्टवेअर इन्स्टॉल करून, तुम्ही खाली दिसणार्या सॉफ्टवेअर परवाना कराराच्या अटींशी बांधील राहण्यास स्वीकार करता आणि सहमत आहात.
कॉपीराइट © इमेज इंजिनिअरिंग जीएमबीएच अँड कंपनी केजी, २०२२
या करारांतर्गत प्रदान केलेले सॉफ्टवेअर "जसे आहे तसे" आधारावर प्रदान केले आहे, कोणतीही हमी किंवा प्रतिनिधित्व व्यक्त किंवा निहित, यासह, परंतु मर्यादित नाही, विशिष्ट हेतूसाठी व्यापारीता किंवा फिटनेसच्या कोणत्याही गर्भित वॉरंटीशिवाय. विशिष्ट उद्देशासाठी किंवा वापरासाठी सॉफ्टवेअरची उपयुक्तता निश्चित करणे ही केवळ ग्राहकाची जबाबदारी आहे. इमेज इंजिनिअरिंग जीएमबीएच अँड कंपनी
KG, आणि या सॉफ्टवेअरच्या निर्मितीमध्ये, उत्पादनात, वितरणामध्ये किंवा समर्थनामध्ये गुंतलेले इतर कोणीही, कोणत्याही परिस्थितीत दोष, त्रुटी किंवा वगळल्यामुळे प्रत्यक्ष, अप्रत्यक्ष, विशेष, परिणामी किंवा आनुषंगिक नुकसानीसाठी जबाबदार राहणार नाही. डिस्केट किंवा सॉफ्टवेअरमध्ये किंवा इतर कोणत्याही घटनांमधून, सेवेतील कोणताही व्यत्यय, नफा किंवा सद्भावना, कायदेशीर कारवाई किंवा इतर कोणतेही परिणामी नुकसान यासह, परंतु इतकेच मर्यादित नाही. वापरकर्ता हे सॉफ्टवेअर वापरल्यामुळे उद्भवणारी सर्व जबाबदारी स्वीकारतो, ज्यासाठी इमेज इंजिनियरिंग GmbH & Co. KG ची कोणतीही जबाबदारी असणार नाही, मग असा वापर कायदेशीर किंवा पूर्वदृष्टी असला तरीही. इमेज इंजिनिअरिंग GmbH & Co. KG कडे या सॉफ्टवेअरद्वारे संग्रहित केलेल्या किंवा वापरलेल्या कोणत्याही डेटा किंवा प्रोग्राम्ससाठी कोणतेही उत्तरदायित्व असणार नाही, ज्यामध्ये असा डेटा किंवा प्रोग्राम पुनर्प्राप्त करण्याच्या खर्चाचा समावेश आहे. इमेज इंजिनियरिंग GmbH & Co. KG ने कोणत्याही वेळी, सूचना न देता, प्रदान केलेल्या माहितीमध्ये आणि संबंधित सॉफ्टवेअरमध्ये सुधारणा किंवा सुधारणा करण्याचा अधिकार राखून ठेवला आहे.
या मॅन्युअलबद्दल अधिक वाचा आणि PDF डाउनलोड करा:
कागदपत्रे / संसाधने
 |
प्रतिमा अभियांत्रिकी STEVE-6D [pdf] वापरकर्ता मॅन्युअल स्टीव्ह-6डी, स्टीव्ह |



