हाय-लिंक HLK-LD2451 वाहन स्थिती शोध मॉड्यूल
उत्पादन माहिती
तपशील
- उत्पादनाचे नाव: HLK-LD2451 वाहन स्थिती शोध मॉड्यूल
- निर्माता: शेन्झेन हाय-लिंक इलेक्ट्रॉनिक कंपनी लिमिटेड
- संवेदन तंत्रज्ञान: एफएमसीडब्ल्यू एफएम सतत लाट रडार सिग्नल प्रक्रिया
- अंतर संवेदना: 100 मी पर्यंत
- आउटपुट: वेग, कोन, अंतर आणि इतर सहाय्यक माहिती
- आउटपुट इंटरफेस: GPIO आणि UART
- वारंवारता बँड: 24GHz आयएसएम बँड
- प्रमाणपत्रे: FCC आणि CE
उत्पादन वापर सूचना
स्थापना
वाहन शोधणे आवश्यक असलेल्या क्षेत्राकडे स्पष्ट दृष्टीक्षेप असलेल्या ठिकाणी मॉड्यूल सुरक्षितपणे बसवले आहे याची खात्री करा. आवश्यक वीज पुरवठा आणि संप्रेषण केबल्स जोडा.
कॉन्फिगरेशन
तुमच्या अर्जाच्या आवश्यकतांनुसार अंतर, वेग, लक्ष्य दिशा आणि संवेदनशीलता यासारखे पॅरामीटर्स कॉन्फिगर करण्यासाठी प्रदान केलेल्या मोबाइल सॉफ्टवेअरचा वापर करा.
एकत्रीकरण
तुमच्या इच्छित बुद्धिमान दृश्यांसह किंवा टर्मिनल उत्पादनांसह डिटेक्शन मॉड्यूल एकत्रित करण्यासाठी GPIO किंवा UART आउटपुट वापरा. प्लग-अँड-प्ले वैशिष्ट्य लवचिक अनुप्रयोगासाठी अनुमती देते.
ऑपरेशन
परिसरातील जवळ किंवा दूर वाहने ओळखण्यासाठी रिअल-टाइम आउटपुट डिटेक्शन निकालांचे निरीक्षण करा. आवश्यकतेनुसार मोबाइल डीबगिंग आणि कॉन्फिगरेशनसाठी प्रदान केलेल्या साधनांचा वापर करा.
वारंवार विचारले जाणारे प्रश्न (FAQ)
- HLK-LD2451 मॉड्यूलचे जास्तीत जास्त सेन्सिंग अंतर किती आहे?
हे मॉड्यूल १०० मीटर अंतरावरील वाहनांना ओळखू शकते. - शोध पॅरामीटर्स कस्टमाइझ करता येतात का?
हो, प्रदान केलेले मोबाइल सॉफ्टवेअर विशिष्ट अनुप्रयोग गरजा पूर्ण करण्यासाठी अंतर, वेग आणि लक्ष्य दिशा यासारख्या पॅरामीटर्सचे सोपे कॉन्फिगरेशन करण्यास अनुमती देते. - कोणत्या परिस्थितीत HLK-LD2451 मॉड्यूल वापरता येईल?
हे मॉड्यूल विविध परिस्थितींमध्ये वापरले जाऊ शकते जसे की महामार्ग चौक, मोटार नसलेले रस्ते, मोटारवे आणि स्मार्ट सीन, वाहने शोधण्यासाठी आणि विविध अनुप्रयोगांमध्ये मदत करण्यासाठी.
उत्पादन प्रोfile
- HLK-LD2451 हे हाय-लिंक इलेक्ट्रॉनिक्सने विकसित केलेले उच्च-संवेदनशीलता 24GHz मोबाइल वाहन स्थिती सेन्सिंग मॉड्यूल आहे. त्याचे कार्य तत्व म्हणजे FMCW FM सतत लाटा वापरून शोध श्रेणीतील लक्ष्य शोधणे, रडार सिग्नल प्रक्रिया आणि अचूक अल्गोरिथम ओळखणे, उच्च-संवेदनशीलता वाहन स्थिती शोधणे, जे जवळ किंवा दूर वाहने ओळखू शकते आणि लक्ष्याचा वेग, कोन, अंतर आणि इतर सहाय्यक माहितीचे आउटपुट मोजू शकते.
- हे उत्पादन प्रामुख्याने बाहेरील दृश्यांमध्ये वापरले जाते, वाहन जवळ आहे की दूर आहे हे ओळखणे, रिअल-टाइम आउटपुट शोध परिणाम आणि १०० मीटर पर्यंतचे सर्वात मोठे सेन्सिंग अंतर. सर्वात मोठे सेन्सिंग अंतर १०० मीटर पर्यंत असू शकते. वेगवेगळ्या अनुप्रयोग आवश्यकता पूर्ण करण्यासाठी सेन्सिंग अंतर, वेग, लक्ष्य दिशा आणि संवेदनशीलता यासारखे पॅरामीटर्स सहजपणे कॉन्फिगर करण्यासाठी मोबाइल सॉफ्टवेअर प्रदान केले आहे.
- GPIO आणि UART आउटपुटला सपोर्ट करा, प्लग अँड प्ले करा, वेगवेगळ्या बुद्धिमान दृश्यांना आणि टर्मिनल उत्पादनांना लवचिकपणे लागू केले जाऊ शकते.
उत्पादन वैशिष्ट्ये
- प्लग अँड प्ले, सोपी असेंब्ली पद्धत
- १०० मीटर पर्यंतचे अंतर संवेदनाक्षमता
- दृश्य बदलांच्या गरजा पूर्ण करण्यासाठी बहु-स्तरीय बुद्धिमान पॅरामीटरायझेशन
- मोबाइल डीबगिंग आणि कॉन्फिगरेशन टूल्स
- कॉन्फिगर करण्यायोग्य शोध अंतर (१०-१०० मीटर मुक्तपणे समायोजित करण्यायोग्य)
- ३ लेनपर्यंतच्या वाहतुकीला व्यापणारा वाइड डिटेक्शन अँगल
- २४GHz ISM बँड, FCC आणि CE स्पेक्ट्रम नियमन प्रमाणित करण्यायोग्य
- अंतिम किफायतशीर निवड
अनुप्रयोग परिस्थिती
HLK-LD2451 वाहन संवेदन मॉड्यूल वाहनाच्या जवळ किंवा दूर वाहने शोधू आणि ओळखू शकतो, बहु-स्तरीय पॅरामीटरायझेशनला समर्थन देतो आणि विविध बुद्धिमान उत्पादने आणि टर्मिनल उत्पादनांमध्ये मोठ्या प्रमाणावर वापरला जाऊ शकतो, सामान्यतः वापरले जाणारे प्रकार खालीलप्रमाणे आहेत.
- महामार्ग चौक
महामार्गाच्या चौकात बसवलेले, ते महामार्गावर जवळून किंवा दूर जाणाऱ्या वाहनांची दिशा, वेग, अंतर इत्यादी ओळखते. - मोटार नसलेला रस्ता
मागून येणाऱ्या वाहनामुळे आणि अचानक लेन बदलल्यामुळे होणारा अपघात टाळणे, दृष्टीच्या मागील क्षेत्रातील अंधत्वाचा ठिपका ओळखणे. - मोटरवे
मागे असलेल्या दूरच्या वाहनांचा शोध घेणे, चालकाला त्यांच्या मागे असलेल्या वाहनाचा मार्ग निश्चित करण्यास मदत करणे. - स्मार्ट सीन
वाहनांचा दृष्टिकोन ओळखणे, रस्त्याचे दरवाजे, गॅरेजचे दरवाजे आणि इतर दृश्यांचे स्वयंचलित नियंत्रण आपोआप उघडणे किंवा बंद होणे
हार्डवेअर वर्णन
बाह्य परिमाणे
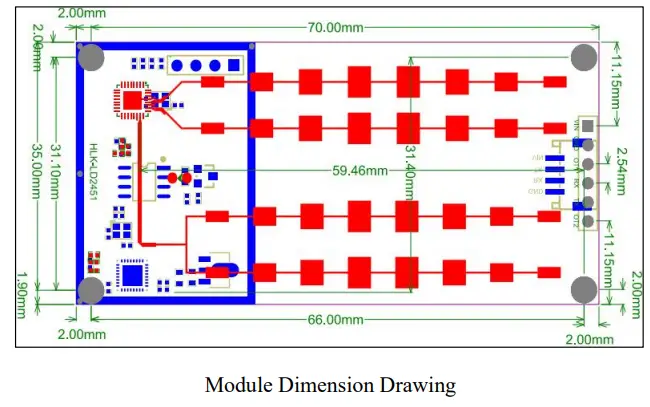
- मॉड्यूल आकार: 70 मिमी x 35 मिमी
- पिनहोल अंतर: 2.54 मिमी
पिन व्याख्या

| पिन
क्रमांक |
नोटेशन | नाव (एखाद्या गोष्टीचे) | कार्यक्षमता |
| 1 | VIN | पॉवर इनपुट | वीज पुरवठा इनपुट 5V |
| 2 | GND | पॉवर ग्राउंड | पॉवर ग्राउंड |
| 3 | OT1 | GPIO1 | इंडिकेटर पिन, पहिल्या स्टार्टअपवर सलग ३ उच्च आणि निम्न आउटपुट जेव्हा एखादी व्यक्ती जवळ येत असल्याचे आढळते तेव्हा उच्च पातळीचे आउटपुट |
| 4 | TX | सिरीयल TX | सिरीयल TX पिन |
| 5 | RX | सीरियल पोर्ट RX | सिरीयल आरएक्स पिन |
| 6 | OT2 | GPIO2 | तात्पुरते अनुपलब्ध |
वापर आणि कॉन्फिगरेशन
ठराविक अनुप्रयोग सर्किट
- LD2451 मॉड्यूल मुख्यतः डेटा आउटपुटच्या निकालांच्या शोधासाठी निर्धारित प्रोटोकॉलद्वारे सिरीयल पोर्टद्वारे, सिरीयल पोर्ट आउटपुट डेटामध्ये अलार्म माहितीचे लक्ष्य (लक्ष्य बंदसह किंवा त्याशिवाय) कोन, अंतर, गती दिशा (जवळ किंवा दूर) आणि इतर माहिती असते, परंतु डेटा शोधण्याचे परिणाम, आउटपुटच्या सिरीयल पोर्ट भागाची सामग्री आणि समान स्वीकारण्यासाठी ब्लूटूथद्वारे देखील. वापरकर्ते विशिष्ट अनुप्रयोग परिस्थितीनुसार ते लवचिकपणे वापरू शकतात.
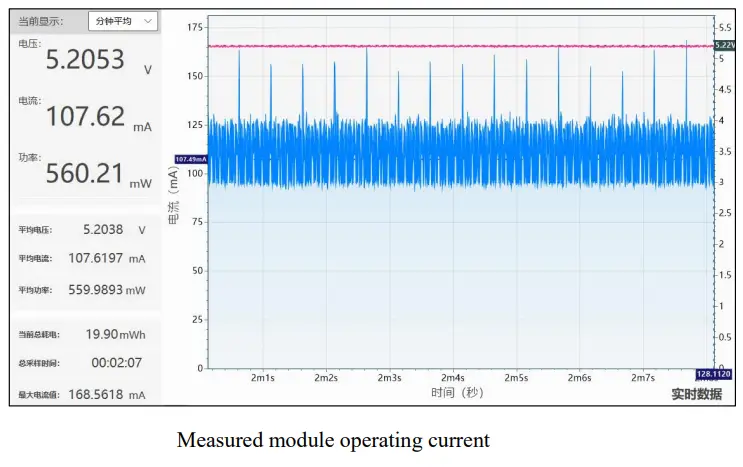
- मॉड्यूल पुरवठा व्हॉल्यूमtage 5V आहे, आणि इनपुट पॉवर सप्लायची पॅलेस क्षमता 300mA पेक्षा जास्त असणे आवश्यक आहे.
- मॉड्यूल IO आउटपुट लेव्हल 3.3V आहे, सिरीयल पोर्टचा डिफॉल्ट बॉड रेट 115200 आहे, 1 स्टॉप बिट, पॅरिटी बिट नाही.
कॉन्फिगरेशन पॅरामीटर्सची भूमिका
- वापरकर्ते वेगवेगळ्या अनुप्रयोग आवश्यकतांनुसार जुळवून घेण्यासाठी LD2451 किंवा ब्लूटूथच्या सिरीयल पोर्टद्वारे मॉड्यूलमधील कॉन्फिगरेशन पॅरामीटर्समध्ये बदल करू शकतात आणि पॉवर-डाउन नंतर कॉन्फिगरेशन सामग्री गमावली जाणार नाही.
- कॉन्फिगर करण्यायोग्य पॅरामीटर्समध्ये खालील गोष्टींचा समावेश आहे:
- जास्तीत जास्त ओळख अंतर
- सर्वात लांब अंतर शोधण्याचे अंतर सेट करा, फक्त या सर्वात लांब अंतराच्या आत दिसणारे लक्ष्य शोधले जातील आणि परिणाम आउटपुट असेल.
- सेटिंग श्रेणी 0~100m
- तपासणी दिशानिर्देश
फक्त जवळ किंवा दूर आणि जवळ आणि दूर असलेले लक्ष्य शोधण्यासाठी कॉन्फिगर करण्यायोग्य.
- जास्तीत जास्त ओळख अंतर
- जेव्हा एकाच दिशेने जाणारे वाहन जवळ येते आणि काही अटी पूर्ण करते तेव्हा लक्ष्य बंद करा आणि फक्त आउटपुट करा असे सेट करा, जेव्हा विरुद्ध वाहन किंवा आजूबाजूचे वातावरण रडार डिटेक्शन रेंजमध्ये प्रवेश करते तेव्हा दूरवर सेट करा आणि फक्त आउटपुट करा, त्याच दिशेने किंवा विरुद्ध दिशेने जाणारे वाहन डिटेक्शन रेंजमध्ये प्रवेश करते की नाही याची पर्वा न करता जवळ आणि दूरवर. शोधलेल्या लक्ष्य माहिती आउटपुट करत असेल.
- शोधण्याची गती
- शोधलेला लक्ष्य वेग हा निश्चित केलेल्या शोध गतीपेक्षा जास्त असतो आणि नंतर तो लक्ष्य असल्याचे ठरवले जाते, अन्यथा ते दुर्लक्षित केले जाते.
- शोधण्याची गती ०~१२० किमी/ताशी श्रेणी सेट केली जाऊ शकते
- शोधण्यात विलंब
रडारला लक्ष्य जवळ येत असल्याचे आढळल्यानंतर अलार्म विलंब वेळ, श्रेणी 1~30s, उदा. जर वेळ 5s वर सेट केली असेल, जर रडारला लक्ष्य जवळ येत असल्याचे आढळले, तर ते 5s चा विलंबित अलार्म संदेश आउटपुट करेल आणि जर रडारला या कालावधीत पुन्हा लक्ष्य जवळ येत असल्याचे आढळले, तर ते यावेळी रिफ्रेश होईल. - संवेदनशीलता
- या पॅरामीटरमध्ये दोन उप-पॅरामीटर्स आहेत, संचयी ट्रिगर संख्या आणि सिग्नल-टू-नॉईज गुणोत्तर थ्रेशोल्ड. दोन्ही शब्द पॅरामीटर्स स्वतंत्रपणे सेट केले जाऊ शकतात, ट्रिगर संख्या पॅरामीटर सेटिंग श्रेणी 1~10 आहे आणि सिग्नल-टू-नॉईज गुणोत्तर पॅरामीटर सेटिंग श्रेणी 1~255 आहे.
- जर ट्रिगर काउंट ३ वर सेट केला असेल, तर शोधलेले लक्ष्य लक्ष्याची ओळख माहिती कळण्यापूर्वी सलग ३ वेळा ट्रिगर केले जाते.
- सिग्नल-टू-नॉईज रेशो पॅरामीटर रडारची डिटेक्शन सेन्सिटिव्हिटी ठरवतो, डिटेक्शन सेन्सिटिव्हिटीचे मूल्य जितके कमी असेल तितके ट्रिगर सेन्सिटिव्ह जास्त असेल, डिटेक्शन सेन्सिटिव्हिटीचे मूल्य जितके जास्त असेल तितके ट्रिगर कमी करणे कठीण असते (डीफॉल्ट व्हॅल्यू 4 आहे, कोणत्याही विशेष परिस्थितीत हे पॅरामीटर सुधारण्याची शिफारस केलेली नाही)
- शोधण्याची गती
मोबाईल अॅप टूलचे वर्णन
वापरकर्त्यांना मॉड्यूलची जलद आणि कार्यक्षमतेने चाचणी आणि कॉन्फिगरेशन करण्यास, मोबाइल एपीपी कॉन्फिगरेशन आणि डिटेक्शन टूल्स प्रदान करण्यास मदत करण्यासाठी, वापरकर्ते हे टूल सॉफ्टवेअर लिंक मॉड्यूल ब्लूटूथ वापरू शकतात, पॅरामीटर कॉन्फिगरेशन आणि रीडिंगसाठी मॉड्यूल, परंतु डेटाचे डिटेक्शन परिणाम, लक्ष्याच्या माहितीच्या डिटेक्शनचे रिअल-टाइम डिस्प्ले, वापरकर्त्याच्या वापरास मोठ्या प्रमाणात सुलभ करते.
- पत्ता डाउनलोड करा:
- अँड्रॉइड अॅप डाउनलोड लिंक: https://www.pgyer.com/Lq8p
- IOS ॲप: साठी शोधा: अॅप स्टोअर अॅप स्टोअरमध्ये HLKRadarTool
- APP वापर:
- मॉड्यूल सामान्यपणे चालू केल्यानंतर, ते “LD2451_XXXX” नावाचे ब्लूटूथ पाठवेल;
- संबंधित परवानग्या सक्षम करण्यासाठी APP उघडल्यानंतर, कनेक्ट मॉड्यूल ब्लूटूथ वर क्लिक करा;
- यशस्वी कनेक्शननंतर शोधलेली लक्ष्य डेटा माहिती या इंटरफेसवर तसेच संबंधित प्रोटोकॉल डेटावर प्रदर्शित केली जाईल;
- पॅरामीटर सेटिंग इंटरफेस, सेट करता येणारे पॅरामीटर्स आणि वरील "कॉन्फिगरेशन पॅरामीटर्स रोल" ची भूमिका प्रविष्ट करण्यासाठी सेटिंग्ज इंटरफेसच्या वरच्या उजव्या कोपऱ्यावर क्लिक करा.
APP शोध डेटा माहिती खाली दर्शविली आहे:

पॅरामीटर सेटिंग इंटरफेस:

स्थापना योजनाबद्ध आणि माउंटिंग ओरिएंटेशन
स्थापनेची जागा:

स्थापना अटी
किमान माउंटिंग क्लीयरन्स सत्यापित करा
जर रडारला एन्क्लोजर बसवायचा असेल, तर एन्क्लोजरमध्ये २४ GHz वर चांगले वेव्ह-ट्रान्समिशन वैशिष्ट्ये असणे आवश्यक आहे आणि त्यात धातूचे पदार्थ किंवा इलेक्ट्रोमॅग्नेटिक लहरींपासून संरक्षण करणारे पदार्थ नसावेत.
स्थापनेसाठी खबरदारी
- रडार अँटेना शक्य तितक्या जास्त शोधण्याच्या क्षेत्राकडे तोंड करून आहे आणि अँटेनाभोवतीचा भाग उघडा आणि अडथळारहित आहे याची खात्री करा.
- सेन्सर एका मजबूत आणि स्थिर स्थितीत बसवलेला आहे याची खात्री करा, कारण रडारला हलवल्याने शोध परिणामांवर परिणाम होईल.
- रडारच्या मागील बाजूस वस्तूंची हालचाल किंवा कंपन होणार नाही याची खात्री करणे महत्वाचे आहे. रडार लाटा आत प्रवेश करत असल्याने, अँटेना सिग्नल बॅक फ्लॅप रडारच्या मागील बाजूस असलेल्या हलत्या वस्तू शोधू शकतो. रडारच्या मागील बाजूस असलेल्या वस्तूंमुळे होणारा परिणाम कमी करण्यासाठी आणि रडारच्या मागील बाजूस असलेल्या वस्तूंमुळे होणारा परिणाम कमी करण्यासाठी मेटल शील्ड किंवा मेटल बॅकिंग प्लेटचा वापर केला जाऊ शकतो.
कामगिरी आणि विद्युत मापदंड
| ऑपरेटिंग वारंवारता | 24GHz~24.25GHz
FCC, CE, नो कमिशन प्रमाणन मानकांचे पालन करते |
| वीज आवश्यकता | डीसी ५ व्ही, वीज पुरवठा क्षमता > २०० एमए |
| सरासरी ऑपरेटिंग वर्तमान | 107mA |
| मॉड्युलेशन पद्धत | FMCW |
| कनेक्टर | २ GPIO, IO पातळी ३.३V
1 यूआआरटी |
| लक्ष्य अर्ज | बाहेरील वाहन लक्ष्य शोधणे |
| ओळख अंतर | 100 मी पर्यंत |
| शोध कोन | ±20° |
| स्वीप बँडविड्थ | <200MHz
FCC, CE आणि No Commission प्रमाणन मानकांची पूर्तता करते |
| ऑपरेटिंग तापमान | -40 ~ 85° से |
| एकूण परिमाणे | 70 मिमी x 35 मिमी |
सुधारित नोंदी
| पुनरावृत्ती तारीख | सोडते | सुधारणाची सामग्री |
| ५७४-५३७-८९०० | 1.0 | प्रारंभिक आवृत्ती |
तांत्रिक समर्थन आणि संपर्क
- शेन्झेन हाय-लिंक इलेक्ट्रॉनिक कंपनी लिमिटेड
- पत्ता: 17F, इमारत ई, झिंगे वर्ल्ड, मिंझी स्ट्रीट, लांब
- हुआ जिल्हा, शेन्झेन ५१८१३
- ईमेल: sales@hlktech.com वर ईमेल करा
- Webसाइट: www.hlktech.net
कागदपत्रे / संसाधने
 |
हाय-लिंक HLK-LD2451 वाहन स्थिती शोध मॉड्यूल [pdf] वापरकर्ता मॅन्युअल HLK-LD2451 वाहन स्थिती शोध मॉड्यूल, HLK-LD2451, वाहन स्थिती शोध मॉड्यूल, स्थिती शोध मॉड्यूल, शोध मॉड्यूल, मॉड्यूल |



